Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Костромской государственный технологический университет, 2004 5 page
Первый показатель качества - перерегулирование (рис.3.14):
 (3.25)
(3.25)
Второй показатель качества позволяет оценить быстродействие системы и называется временем регулирования tп (временем переходного процесса tп).
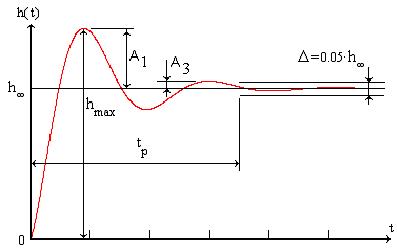
Рис.3.14. График переходного процесса
Учитывая, что полное затухание в системе происходит лишь при t®¥, условно стали считать окончанием переходного процесса точку пересечения графика процесса с линиями отстоящими на ±5% от установившегося значения регулируемой величины.
Третий показатель качества характеризует число колебаний Nр регулируемой величины в течение времени переходного процесса (это число переходов через установившееся положение за время регулирования).
Далее выделяются такие показатели, как степень затухания и показатель колебательности.
Степень затухания (y) характеризует быстроту затухания колебаний регулируемой величины относительно установившегося значения и рассчитывается по формуле:
 (3.26)
(3.26)
где Аi - отклонение регулируемой величины от установившегося значения (+/-).
Чем больше степень затухания, тем быстрее регулируемая величина придет к установившемуся значению.
Показатель колебательности (m) характеризует склонность электропривода к колебаниям и определяется:
 (3.27)
(3.27)
Чем больше показатель колебательности, тем меньше колебаний относительно установившегося значения совершит регулируемая величина до того, как придет к установившемуся значению.
Кроме того, оценивается максимальное динамическое отклонение регулируемой величины в переходном процессе А1 и статическая ошибка δ, если она имеет место.
Определив все эти показатели составим сводную таблицу 3.1.
Таблица сравнения показателей качества. Таблица 3.1.
| Показатели | Обозначение | Заданные | Рассчитанные |
| Запас по амплитуде, дБ | La | ||
| Запас по фазе, о | Lf | ||
| Перерегулирование, % | smax | ||
| Время регулирования, с | tp | ||
| Число колебаний, шт | Np | ||
| Степень затухания | y | ||
| Показатель колебательности | m | ||
| Максимальное отклонение | А1 | ||
| Статическая ошибка | δ |
Необходимо сделать выводы о соответствии рассчитанных показателей заданным.
3.8. Выводы по разделу
В данном разделе мы определили передаточные функции отдельных элементов системы электропривода, составили общую передаточную функцию в соответствии с расчетной структурной схемой, проверили систему на устойчивость, синтезировали корректирующее устройство, построили переходные процессы по управляющему и возмущающему воздействию и определили показатели качества регулирования.
Сделали выводы о соответствии динамических показателей работы привода заданию.
Выводы по курсовому проекту
По результатам расчетов необходимо сделать выводы, в которых следует сопоставить результаты расчета статических и динамических показателей работы системы электропривода с заданием, и высказать свои соображения по работе системы.
Необходимо оценить правильность выбора электрооборудования и дать рекомендации по возможной эквивалентной замене оборудования.
Следует иметь ввиду, что мы рассматривали линеаризованную систему электропривода. Реальный электропривод является нелинейной системой и поэтому следует оценить возможное влияние, имеющих место нелинейностей.
БИБЛИОГРАФИЧЕСКИЙ Список
1. Справочник по автоматизированному электроприводу /Под ред. Елисеева В.А. и Шинявского А.В. - М.: Энергоатомиздат, 1983. - 616 с.
2. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики М.: Высшая школа, 1986.
3. Чиликин М.Г. Теория автоматизированного электропривода: Учеб. пособие для вузов /Чиликин М.Г., Клюев В.И., Сандлер А.С. - М.: Энергия, 1979. - 616 с.
4. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - М.: Энергоиздат, 1981. - 576 с.
5. Справочник по электрическим машинам: В 2 т. /Под общ. ред. Копылова И.П., Клокова Б.К. - М.: Энергоатомиздат, 1988. - 456 с. и 688 с.
6. Шипилло В.П. Автоматизированный вентильный электропривод. - М.: Энергия, 1969. - 400 с.
7. Анализ замкнутых систем управления электроприводами: Учеб. пособие /Архангельский Н.Л.; Иван. гос. ун-т. - Иваново, 2000. - 116 с.
8. Характеристика и защита полупроводниковых преобразователей: Учеб. пособие / Архангельский Н.Л., Курнышев Б.С., Литвинский А.Н.; Иван. гос. энерг. ун-т. - Иваново, 2000. - 96 с.
9. Инженерные расчеты взаимосвязанных электроприводов текстильных машин: Учеб. пособие /Глазунов В.Ф., Литвинский А.Н., Куленко М.С.; Иван. гос. энерг. ун-т. - Иваново, 1999. - 135 с.
10. Анхимюк В.Л., Опейко О.Ф. Проектирование систем автоматического управления электроприводами: Учеб. пособие для вузов по спец. «Электропривод и автоматизация промышленных установок». - Мн.: Высш. шк., 1986. - 146 с.
11. Белопольский И.И., Каретникова Е.М., Пикалова Л.Г. Расчет трансформаторов и дросселей малой мощности. – М.: Энергоатомиздат, 1985. - 256 с.
12. Смирнова В.И., Разинцев В.И. Проектирование и расчет автоматизированных приводов: Учебник для сред. спец. учеб. заведений. - М.: Машиностроение, 1990. - 368 с.
13. Гутников В.С. Интегральная электроника в измерительных устройствах. - Л.: Энергоатомиздат, 1988. - 304 с.
14. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами: Учеб. пособие для студентов вузов. - М.: Высш. шк., 1979. - 318 с
15. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1983. - 606 с.
16. Клюев А.С. Автоматическое регулирование. - М.: Энергия, 1973. - 392 с.
ПРИЛОЖЕНИЕ 1 «Двигатели постоянного тока серии ПБСТ». Таблица П.1.
| Технические данные двигателей серии ПБСТ (номинальная скорость 1000 об/мин) | |||||||||||||
| Тип двигателя | ПБСТ | ||||||||||||
| Мощность | Рн | кВт | 0,4 | 0,55 | 0,8 | 1,0 | 1,4 | 1,9 | 2,5 | 3,3 | 4,7 | 5,4 | |
| Напряжение | Uн | В | |||||||||||
| Ток | Iн | А | 4,8 | 6,4 | 9,0 | 10,8 | 15,5 | 21,0 | 13,2 | 16,6 | 24,0 | 27,0 | |
| Момент | Мн | Н*м | 3,82 | 5,26 | 7,64 | 9,5 | 13,3 | 18,2 | 23,9 | 31,6 | 45,7 | 51,6 | |
| Магнитный поток | Фн | Вб*10-3 | 1,83 | 2,38 | 3,15 | 4,3 | 3,76 | 5,3 | 6,4 | 9,85 | 8,86 | 13,5 | |
| КПД | hн | % | 75,5 | 79,0 | 80,5 | 84,0 | 88,0 | 82,3 | 86,0 | 90,0 | 87,0 | 91,5 | |
| Момент инерции | Jдв | Кг*м2 | 0,015 | 0,017 | 0,026 | 0,028 | 0,045 | 0,056 | 0,092 | 0,116 | 0,17 | 0,223 | |
| Число витков обмотки якоря | Wя | Вит. | |||||||||||
| Сопротивление якоря при 150 С | Rя | Ом | 1,76 | 1,18 | 0,6 | 0,42 | 0,44 | 0,25 | 0,72 | 0,44 | 0,34 | 0,62 | |
| Сопротивление добавочных полюсов при 150 С | Rдп | Ом | 1,1 | 0,66 | 0,44 | 0,24 | 0,23 | 0,162 | 0,32 | 0,172 | 0,114 | 0,064 | |
| Число витков обмотки возбуждения | Wов | Вит. | |||||||||||
| Сопротивления обмотки возбуждения при 150 С | Rов | Ом | |||||||||||
| Постоянная времени нагрева | Тн | мин | |||||||||||
Примечание: в таблице П.1. значения постоянных времени нагрева Тн двигателей даны ориентировочно.
Двигатели постоянного тока серии ПБСТ» (продолжение). Таблица П.1.
| Технические данные двигателей серии ПБСТ (номинальная скорость 1500 об/мин) | ||||||||||||
| Тип двигателя | ПБСТ | |||||||||||
| Мощность | Рн | кВт | 0,6 | 0,85 | 1,2 | 1,6 | 2,1 | 2,8 | 4,1 | 4,8 | 7,2 | 7,8 |
| Напряжение | Uн | В | ||||||||||
| Ток | Iн | А | 7,0 | 9,2 | 13,0 | 17,0 | 22,0 | 14,5 | 20,8 | 24,2 | 36,0 | 38,0 |
| Момент | Мн | Н*м | 3,82 | 5,41 | 7,64 | 10,2 | 13,3 | 17,9 | 26,9 | 30,6 | 45,9 | 49,6 |
| Магнитный поток | Фн | Вб*10-3 | 1,75 | 2,16 | 3,11 | 3,97 | 4,0 | 5,84 | 6,5 | 6,85 | 8,85 | 13,6 |
| КПД | hн | % | 83,4 | 85,5 | 86,7 | 87,5 | 89,5 | 90,0 | 90,5 | |||
| Момент инерции | Jдв | Кг*м2 | 0,015 | 0,027 | 0,026 | 0,028 | 0,045 | 0,056 | 0,092 | 0,11 | 0,17 | 0,223 |
| Число витков обмотки якоря | Wя | Вит. | ||||||||||
| Сопротивление якоря при 150 С | Rя | Ом | 0,62 | 0,59 | 0,3 | 0,23 | 0,19 | 0,42 | 0,38 | 0,21 | 0,15 | 0,077 |
| Сопротивление добавочных полюсов при 150 С | Rдп | Ом | 0,67 | 0,367 | 0,187 | 0,11 | 0,098 | 0,28 | 0,138 | 0,1 | 0,064 | 0,3 |
| Число витков обмотки возбуждения | Wов | Вит. | ||||||||||
| Сопротивления обмотки возбуждения при 150 С | Rов | Ом | ||||||||||
| Постоянная времени нагрева | Тн | мин |
Двигатели постоянного тока серии ПБСТ» (продолжение). Таблица П.1.
| Технические данные двигателей серии ПБСТ (номинальная скорость 2200 об/мин) | ||||||||||||
| Тип двигателя | ПБСТ | |||||||||||
| Мощность | Рн | кВт | 0,85 | 1,15 | 1,5 | 2,1 | 2,9 | 3,8 | 5,5 | 6,3 | 10,0 | 11,0 |
| Напряжение | Uн | В | ||||||||||
| Ток | Iн | А | 9,6 | 12,6 | 16,0 | 11,0 | 15,0 | 19,5 | 27,8 | 31,2 | ||
| Момент | Мн | Н*м | 3,7 | 5,0 | 6,5 | 9,1 | 12,6 | 16,5 | 23,9 | 27,3 | 43,4 | 47,7 |
| Магнитный поток | Фн | Вб*10-3 | 1,8 | 2,13 | 3,25 | 3,83 | 3,48 | 5,12 | 6,05 | 9,24 | 9,28 | 12,4 |
| КПД | hн | % | 80,3 | 83,0 | 85,5 | 86,7 | 88,8 | 88,0 | 90,0 | 91,5 | 90,5 | 92,5 |
| Момент инерции | Jдв | кг*м2 | 0,015 | 0,017 | 0,026 | 0,028 | 0,045 | 0,056 | 0,092 | 0,116 | 0,17 | 0,223 |
| Число витков обмотки якоря | Wя | вит. | ||||||||||
| Сопротивление якоря при 150С | Rя | Ом | 0,44 | 0,31 | 0,15 | 0,5 | 0,47 | 0,25 | 0,18 | 0,11 | 0,066 | 0,046 |
| Сопротивление добав. полюсов при 150С | Rдп | Ом | 0,31 | 0,266 | 0,105 | 0,264 | 0,244 | 0,162 | 0,074 | 0,042 | 0,024 | 0,019 |
| Число витков обмотки возбуждения | Wов | вит. | ||||||||||
| Сопротивление обмотки возбуждения при 150С | Rов | Ом | ||||||||||
| Постоянная времени нагрева | Тн | мин |
Двигатели постоянного тока серии ПБСТ» (продолжение). Таблица П.1
| Технические данные двигателей серии ПБСТ (номинальная скорость 3000 об/мин) | |||||||||||
| Тип двигателя | ПБСТ | ||||||||||
| Мощность | Рн | кВт | 1,0 | 1,3 | 1,75 | 2,35 | 3,4 | 4,3 | 6,5 | 8,0 | 11,3 |
| Напряжение | Uн | В | |||||||||
| Ток | Iн | А | 14,4 | 9,5 | 12,5 | 17,6 | 39,4 | ||||
| Момент | Мн | Н*м | 3,18 | 4,15 | 5,4 | 7,45 | 10,8 | 12,7 | 20,78 | 25,5 | 35,9 |
| Магнитный поток | Фн | Вб*10-3 | 1,73 | 2,2 | 2,85 | 3,83 | 3,19 | 4,14 | 5,36 | 9,14 | 9,14 |
| КПД | hн | % | 82,5 | 85,5 | 87,5 | 88,5 | 89,5 | ||||
| Момент инерции | Jдв | кг*м2 | 0,015 | 0,017 | 0,026 | 0,028 | 0,045 | 0,056 | 0,092 | 0,116 | 0,17 |
| Число витков обмотки якоря | Wя | вит. | |||||||||
| Сопротивление якоря при 150С | Rя | Ом | 0,26 | 0,17 | 0,46 | 0,28 | 0,33 | 0,22 | 0,14 | 0,052 | 0,04 |
| Сопротивление добав. полюсов при 150С | Rдп | Ом | 0,19 | 0,148 | 0,21 | 0,142 | 0,15 | 0,124 | 0,05 | 0,025 | 0,014 |
| Число витков обмотки возбуждения | Wов | вит. | |||||||||
| Сопротивление обмотки возбуждения при 150С | Rов | Ом | |||||||||
| Постоянная времени нагрева | Тн | мин |
Date: 2015-06-11; view: 604; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |