Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
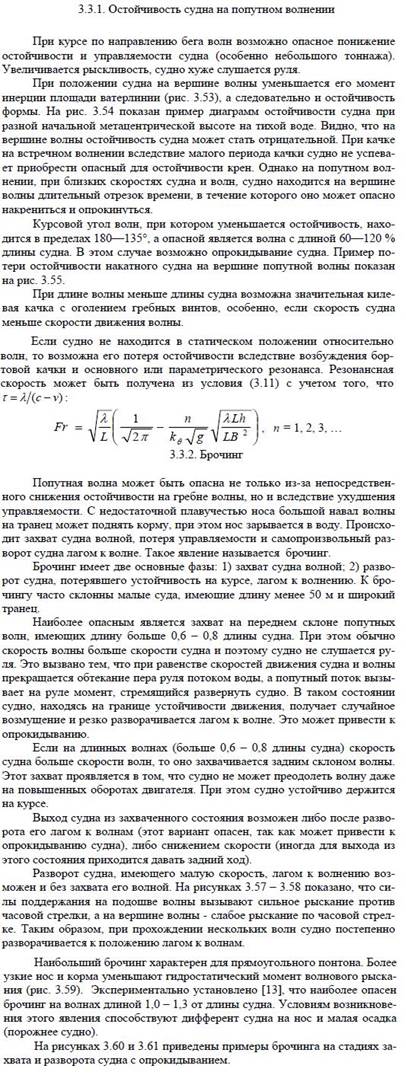
Мореходность глиссирующих судов
1
2,3,4
 5
5
8. Белый шум — стационарный шум, спектральные составляющие которого равномерно распределены по всему диапазону задействованных частот.
В природе и технике «чисто» белый шум (то есть белый шум, имеющий одинаковую спектральную мощность на всех частотах) не встречается (ввиду того, что такой сигнал имел бы бесконечную мощность), однако под категорию белых шумов попадают любые шумы, спектральная плотность которых одинакова (или слабо отличается) в рассматриваемом диапазоне частот.
Термин «белый шум» обычно применяется к сигналу, имеющему автокорреляционную функцию, математически описываемую дельта-функцией Дирака по всем измерениям многомерного пространства, в котором этот сигнал рассматривается. Сигналы, обладающие этим свойством, могут рассматриваться как белый шум. Данное статистическое свойство является основным для сигналов такого типа.
То, что белый шум некоррелирован по времени (или по другому аргументу), не определяет его значений во временной (или любой другой рассматриваемой аргументной) области. Наборы, принимаемые сигналом, могут быть произвольными с точностью до главного статистического свойства (однако постоянная составляющая такого сигнала должна быть равна нулю). К примеру, двоичный сигнал, который может принимать только значения, равные нулю или единице, будет являться белым шумом только если последовательность нулей и единиц будет некоррелирована. Сигналы, имеющие непрерывное распределение (к примеру, нормальное распределение), также могут быть белым шумом.
Белый шум используется для измерения частотных характеристик различных линейных динамических систем, таких как усилители, электронные фильтры, дискретные системы управления и т. д. При подаче на вход такой системы белого шума, на выходе получаем сигнал, являющийся откликом системы на приложенное воздействие. Ввиду того, что амплитудно-фазовая частотная характеристика линейной системы есть отношение преобразования Фурье выходного сигнала к преобразованию Фурье входного сигнала, получить эту характеристику математически достаточно просто, причём для всех частот, для которых входной сигнал можно считать белым шумом.
9. 
10. Но любое вынужденное изменение курса равносильно снижению средней достижимой скорости – просто за счёт удлинения траектории корабля при движении «галсами». Успокоители бортовой качки эффективны только до определённой интенсивности волнения, да и пользуются ими не всегда – вероятно, опасаясь исчерпания ресурса приводов. Так что обычно на более или менее интенсивном волнении корабли двигаются на встречном или, реже, на попутном волнении. Сравнения скорости на волнении обычно также производятся для случая встречного волнения.
В числе причин, ограничивающих скорость на волнении, амплитуды и-или ускорения качки, днищевой и-или скуловой слеминг, заливаемость палубы, превышение сверх допустимых пределов продольного изгибающего момента.
Допустимая по различным ограничениям мореходности скорость определяется как мореходными качествами конкретного корабля, так и уровнями допустимых характеристик мореходности, перечисленных выше.
Эти уровни, фактически – нормы мореходности, могут быть приняты по различным соображениям, которые будут рассмотрены ниже.
На рис. 1 показаны результаты анализа мореходности на встречном волнении, включая отдельные ограничения по качке, слемингу, заливаемости – при некоторых практически применяемых нормах этих характеристик.
Очевидно, что реальная достижимая скорость представляет собой огибающую показанные линии снизу кривую.
Эти и аналогичные расчёты показывают, что гидро- и аэродинамические причины определяют скорость на встречном волнении рассмотренного корабля – водоизмещением около 3 тысяч тонн – только до высоты волны 3 % - ной обеспеченности около 2.5 м, т.е. чуть более 4 баллов по шкале Бофорта. Это соответствует высоте волны, отнесённой к кубическому корню из водоизмещения около 0.15 – 0.17. Так что скорость корабля большего водоизмещения будет соответственно больше, но кубическая зависимость от водоизмещения не позволяет рассчитывать на существенное повышение этого предела скорости за счёт роста размеров корабля: это слишком затратный путь.
Вид показанных зависимостей позволяет предположить, что каждый из этих процессов имеет некоторый район максимума – когда интенсивность процесса растёт наиболее интенсивно – и зарезонансный район, где скорость нарастания характеристик при росте интенсивности волнения существенно падает.

Очевидно, что скорость хода при достаточно интенсивном волнении не может быть достигнута никаким повышением используемой мощности, но только – повышением мореходности. И если учесть повторяемость волнения в различных районах Мирового Океана, а также более существенную потерю скорости кораблями меньшего водоизмещения, крайняя желательность повышения мореходности водоизмещающих боевых кораблей представляется бесспорной.
Но наибольшие преимущества по всем показателям мореходности обеспечивают корабли и суда с малой площадью ватерлинии. Преимущество это приблизительно пропорционально относительной площади ватерлинии. Судя по результатам испытаний многочисленных моделей и натурным данным о примерно 70 построенных судах с такими обводами, СМПВ имеет такую же мореходность, как однокорпусное судно в 5 – 15 раз большего водоизмещения – в зависимости от достигнутого снижения удельной площади ватерлинии. Дополнительным преимуществом является то, что сниженные – из-за снижения площади ватерлинии – возмущающие силы и моменты таких кораблей и судов оказываются сравнимыми со стабилизирующими силами и моментами, генерируемыми разными успокоителями качки. Ниже будет показана некоторая обобщающая характеристика КМПВ, определённая по комплексной методике сравнения мореходных качеств.
11. 


13. 
14. 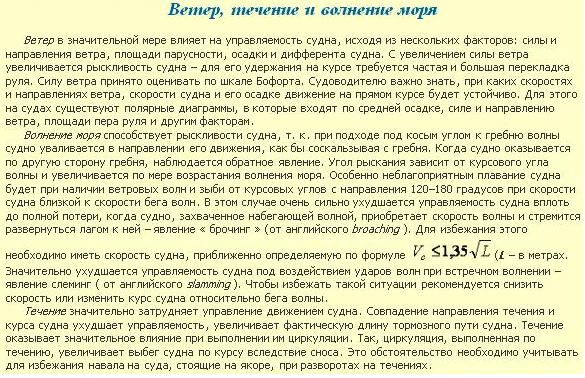
15. При плавании в штормовых условиях очень важно выбрать рациональный курс и скорость судна относительно волнения и ветра. Скорость судна на волнении всегда меньше скорости на тихой воде вследствие:
• увеличения сопротивления движению, вызванного воздействием ветра и волнения на корпус, а также рыскания судна на курсе;
• снижение эффективности действия гребного винта;
• разгона гребного винта;
• намеренное снижение скорости движения самим судоводителем при возникновении слеминга, заливания и т.п.
Потеря скорости. При плавании в шторм приходится выбирать такую скорость, которая бы обеспечивала безопасный режим плавания. Для приблизительной оценки потери скорости на волнении может быть использована формула Г. Аертсена: 
где m и n – эмпирические коэффициенты;
V0 – скорость полного хода судна на тихой воде, м/с;
L – длина судна между перпендикулярами, м.
Рыскание судна оказывает влияние на скорость движения, уменьшая ее, и на:
• сопротивление корпуса движению из-за переменного угла дрейфа (увеличивает) и перекладок руля;
• длину пути судна, увеличивая ее;
• изменение режима работы гребного винта;
• увеличение расхода топлива.
Слеминг возникает при продольной качке из-за ударов днища судна о гребни волн. Вероятность ударов днища тем выше, чем больше высота волны и скорость судна. Слеминг наблюдается на встречном волнении, но может быть и кормовым. Избегают это явление снижением скорости или увеличением соответственно осадки носом или кормой.
Удары волн в развал носа и заливание палубы (бортовой слеминг или випинг) вызывают вибрацию и повреждения, как корпуса судна, так и его конструкций и палубного груза. Этого можно избежать, снизив скорость судна или уменьшив осадку носом.
Разгон гребного винта и двигателя вероятен у судов, на которых винты имеют малое погружение в воде. Напряжения в гребном валу при оголении винта могут возрасти в 2–3 раза, что может привести к поломке лопастей, конструкций гребного валопровода, вызвать вибрацию вала и кормы. Очень опасен разгон для дизельных двигателей. Избегают это явление увеличением осадки кормой или уменьшением скорости судна.
16. Мореходность многокорпусных судов зависит от количества, расположения и формы обводов составляющих корпусов. И каждый тип многокорпусников имеет те или иные преимущества по сравнению с однокорпусным судном. Прежде всего, все многокорпусники имеют разное соотношение между силами инерции и плавучести, что определяет отличия собственных периодов качки, весьма существенные для мореходности.
Например, большая поперечная остойчивость катамарана «пересиливает» увеличение момента инерции массы относительно продольной оси, так что собственный период бортовой качки катамарана примерно вдвое меньше, чем у сравнимого однокорпусного судна. Это означает, что резонанс бортовой качки при положении судна лагом к волнам наступает при меньших длинах волн, у которых меньше энергия. На более длинных волнах бортовая качка катамарана далека от резонансных условий и потому существенно меньше, чем у однокорпусного судна.
Практический пример этого был продемонстрирован траулерами советской постройки «Эксперимент» и «Эксперимент-2», которые штормовали лагом к волне 6 баллов при водоизмещении около 1000 т. Очевидно, что такой вариант плавания недоступен однокорпусному судну даже намного большего водоизмещения.
Если катамаран правильно спроектирован, ускорения его бортовой качки не больше, чем у сравнимого однокорпусного судна – при меньших амплитудах качки. А продольная качки катамарана на встречном волнении примерно такова же, как и качка однокорпусного судна той же длины и водоизмещения – при возможном дополнительном влиянии соотношений размерений корпусов катамарана. Продольная качка тримарана тем меньше качки катамарана, чем больше габаритная длина первого.
Преимущества мореходности СМПВ (Судно с малой площадью ватерлинии) являются прямыми и косвенными результатами малости площади их ватерлинии. Собственные периоды всех видов качки СМПВ в среднем примерно в два раза больше, чем сравнимых однокорпусных судов, также из-за разности соотношений остойчивости и инерции.
Возмущающие силы и моменты, действующие на СМПВ на волнении, пропорциональны площади ватерлинии. При этом крупнотоннажные относительно тихоходные СМПВ и полупогружные платформы почти никогда не попадают в резонансные условия. СМПВ других размеров попадают в условия резонанса, но, в отличие от однокорпусных судов, не на встречном волнении, а на кормовых курсовых углах. Увеличение скорости приводит к снижению качки СМПВ на встречном волнении. Очень маленькое дополнительное сопротивление СМПВ на встречном волнении также является следствием малой площади ватерлинии.
Резонансные амплитуды качки СМПВ больше, чем у однокорпусных судов, однако обычно в более узком диапазоне частот. Этот недостаток компенсируется большой эффективностью успокоителей качки, генерируемые которыми силы и моменты приближаются по величинам к возмущающим силам и моментам на корпусах с малой площадью ватерлинии. Успокоительные цистерны, активизированные воздухом, можно рекомендовать для тихоходных или стоящих на волнении СМПВ и платформ.
В целом правильно спроектированные СМПВ имеют примерно такую же мореходность, как однокорпусные суда в 5–15 раз большего водоизмещения (в зависимости от удельной площади ватерлинии).
Метод сравнения мореходности судов различных типов (Dubrovsky, Lyakhovitsky, 2001) показал существенное (в 1,5–2 раза) преимущество СМПВ в отношении среднегодовой достижимой скорости при выполнении заданных норм мореходности. Водоизмещение «всепогодного» (не теряющего скорость и не меняющего курс на волнении до 6 баллов включительно) СМПВ может быть около 5–6 тыс. т, см. рис. 7., где показан средний оперативный индекс для Северной Атлантики, т. е. часть времени, когда выполняются заданные нормы мореходности и скорость не снижается намеренно. (Указанная интенсивность волнения была принята потому, что более интенсивное волнение встречается не чаще, чем 1 раз в год.)
В настоящее время мореходность многокорпусных судов не прогнозируема с достаточной для проектирования степенью точности без выполнения модельных испытаний, поскольку применимость имеющихся программ не проверена в достаточной степени для разных типов судов.
Вертикальный клиренс (расстояние от днища надводной платформы до расчетной ватерлинии) является одной из важнейших характеристик многокорпусных судов. Его величину можно обоснованно выбрать только после получения экспериментальных данных о перемещении уровня воды относительно днища платформы на волнении. Для ранних стадий проектирования разработаны основанные на проведенных испытаниях и небольшой статистике рекомендации по выбору вертикального клиренса (Dubrovsky and Lyakhovitsky, 2001).
Отмеченные выше особенности качки СМПВ определяют отличия их тактики штормования: если однокорпусные суда обычно штормуют на встречном или иногда – на попутном волнении, то для СМПВ лучший вариант – встречное волнение, на котором поддержание высокой скорости снижает и их качку.
17.
18. 

19. 
20. 

21. 
22. 

23.24.25. 







26. 
29. Процесс торможения судна, идущего передним ходом, условно можно разделить на три периода (рис. 14.10).
Первый период (время t1)— от момента установки на машинном телеграфе команды заднего хода до момента прекращения подачи топлива в двигатель (или закрытия стопорного клапана в случае, если судно имеет паровую машину или турбину). В этот период судно следует с постоянной скоростью установившегося движения Vc. Путь судна, пройденный в этот период,
 |
Продолжительность периода t1 зависит от типа энергетической установки, наличия или отсутствия дистанционного управления главными двигателями и действий механика. Время t1 определяется только по эксперименту на конкретном судне. Для расчетов можно принять t1 = 5÷7 с.
Второй период (время t2) — с момента прекращения подачи топлива до пуска двигателя на задний ход. В целом продолжительность второго периода весьма существенно зависит от действий механика и обычно оценивается статистическим путем.
Движение судна во втором периоде можно рассматривать как режим пассивного торможения, который описывается следующим дифференциальным уравнением:
 |
где е, eL — коэффициенты, учитывающие влияние соответственно глубины моря и свободно вращающегося гребного винта.
 После разделения переменных и интегрирования в пределах от О до ti и от Ус до Vt получим (в с):
После разделения переменных и интегрирования в пределах от О до ti и от Ус до Vt получим (в с):
откуда

где Vc — начальная скорость, м/с;
t1 — время пассивного торможения, с.
Третий период — это активный участок торможения судна при частоте вращения движителя на задний ход в заданном режиме.
Процесс активного торможения описывается дифференциальным уравнением

Данное уравнение справедливо при определенных допущениях. Исследованиями доказано, что упор винта на заднем ходу колеблется в незначительных пределах и равен некоторому среднему значению Т, эквивалентному по конечному результату торможения переменному упору T(t). В этом случае уравнение (14.14) интегрируется в конечном виде. Принимая в качестве начальных условий характеристики второго периода ti= t2, S,- = S2 и Vi = V2, получим следующие выражения для характеристик третьего периода:
 |
В приведенных формулах: ii — время активного торможения, с; Vi — скорость, м/с; Si — путь активного торможения, м.
Третий период торможения заканчивается при V i, = 0. Тогда: 
Окончательные полные выражения времени и пути торможения судна получаем суммированием отдельных их значений по трем периодам:
30. 
31.
Мореходность глиссирующих судов
Под мореходностью понимается совокупность навигационных качеств, обеспечивающих безопасность и удобство использования судна в конкретных условиях эксплуатации (плавучесть, остойчивость, управляемость, ходкость, незаливаемость на волне и т.д.)
Более узко под мореходностью понимается поведение судна при движении на взволнованной воде. Судно считается мореходным, если оно имеет плавную качку, не зарывается в воду при встрече с волной и мягко с ней соударяется, устойчиво на курсе и остойчиво на попутной волне.
Основным критерием мореходности глиссеров является устойчивость их движения при волнении и величина вертикальных перегрузок от соударения корпуса с волной.
На устойчивость движения влияет ряд факторов: центровка (положение ЦТ по длине и высоте), форма корпуса и соотношение главных размерений, дифферентующий момент от упора движителя и его реактивный крутящий момент, форма и расположение руля, воздействие аэродинамических сил.
Различают устойчивость на курсе и устойчивость глиссирования.
Нарушение устойчивости на курсе проявляется в виде: рыскливости (уход с курса вправо или влево, что сопровождается постоянной перекладкой руля и снижением скорости) или внезапного разворота на ходу, доходящего до 180° при незначительной перекладке руля.
Эти явления (рыскливость, внезапный разворот) зависят от взаимного расположения ЦТ и центра общего сопротивления глиссера. Если центр общего сопротивления расположен впереди ЦТ, то нарушения устойчивости на курсе вполне возможны.
Нарушение устойчивости глиссирования проявляется в виде рикошетирования или дельфинирования.
Рикошетирование возникает у судов с малой удельной нагрузкой, движущихся с высокой скоростью по взволнованной поверхности. Рикошетирование расшатывает конструкцию и снижает скорость до 50% и более.
Дельфинирование – неустойчивое движение судна с плавным периодическим раскачиванием вокруг поперечной оси, иногда со все увеличивающимся размахом. Дельфинирование возникает по ряду причин:
a. Лишнее смещение ЦТ в нос;
b. Слишком низкое расположение ЦТ;
c. Малый продольный момент инерции глиссирующей поверхности;
d. Аэродинамический момент, дифферентующий судно на нос.
На мореходность глиссирующих судов влияет также и динамическая поперечная остойчивость (ДПО). ДПО зависит от ширины глиссирующей поверхности, формы днища и положения ЦТ по высоте. На рис. 2.6,а показаны схемы распределения динамического давления по ширине судна для различных форм поперечного сечения днища.
32. Система динамического позиционирования — (англ. dynamic positioning system) — система, предназначенная для удержания судна в заданной позиции или области и (или) на заданном курсе, его перемещения на небольшие расстояния, следования вдоль заданного маршрута автоматически с высокой точностью посредством использования судовых движителей и подруливающих устройств.
Международная морская организация даёт следующее определение: «Система динамического позиционирования — это система, которая автоматически контролирует судно для удержания его позиции и курса исключительно посредством активного использования судовых движителей»[1].
Для управления судном, оснащенным системой динамического позиционирования, необходимо получение сертификатов.
Элементы системы
-система энергоснабжения;
-система судовых движителей;
-система управления динамическим позиционированием.
Система электроснабжения включает в себя все компоненты и системы, необходимы для снабжения системы ДП энергией, а именно:
-первичные источники энергии со всеми вспомогательными системами, включая трубопроводы;
-генераторы;
-распределительные щиты;
-распределительная сеть (кабели).
Система судовых движителей включает в себя:
-подруливающие устройства с их моторами и вспомогательными системами, включая трубопроводы;
-главные движители (винты регулируемого или фиксированного шага, винторулевые поворотные колонки, крыльчатые движители) и рули — если могут управляться системой ДП;
-электроника, управляющая подруливающими устройствами;
-элементы ручного управления подруливающими устройствами;
-соединенные с этими элементами кабели.
Система управления ДП включает в себя все компоненты и системы, аппаратные средства и программное обеспечение, необходимые для решения задачи динамического позиционирования судна, а именно:
-компьютерная система / система управления джойстиком, сопутствующие интерфейсы и программное обеспечение;
-сенсоры (анемометры для определения параметров ветра, датчики положения (MRU — Motion Reference Unit или VRS — Vertical Reference System) для определения параметров качки, гирокомпасы для определения курса;
-консоли (пульты) управления;
-системы позиционирования;
-сопутствующие кабели.
34. 
Date: 2016-08-30; view: 613; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |