Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Построение моделей вход-выход [1].
Модель вход-выход строится по известным уравнениям отдельных компонентов (блоков, звеньев). Процедура сводится к преобразованию системы дифференциальных уравнений, описывающих поведение отдельных блоков, к единому уравнению системы управления.
Простейшие соединения блоков. Возможны три способа соединения звеньев: последовательное, параллельное и встречно-параллельное или соединение с обратной связью (ОС).
 Рис. 3.6.1.
Рис. 3.6.1.
|
Последовательное соединение блоков. Последовательным называют такое соединение звеньев, при котором выходная величина предыдущего звена является входной для последующего (рис. 3.6.1). При известных передаточных функциях звеньев, можно записать:
X2(p) = W2(p) X3(p), X1(p) = W1(p) X2(p) = W1(p)W2(p)X3(p).
W(p) = W1(p) W2(p).
Таким образом, систему из неограниченного количества звеньев, включенных последовательно, можно заменить одним эквивалентным звеном с передаточной функцией W(p) равной произведению передаточных функций звеньев.
Рассмотрим последовательное соединение апериодического звена (с единичным коэффициентом передачи W1(p) = 1/(Tp+1)) и идеального дифференцирующего звена (W2(p) = kp). Передаточная функция
W(p) = kp/(Tp+1),
что полностью совпадает с передаточной функцией реального дифференцирующего звена.
 Рис. 3.6.2.
Рис. 3.6.2.
|
Параллельное соединение блоков. При параллельном соединении звеньев на все входы подается одна и та же величина, а выходная величина равна сумме выходных величин отдельных звеньев (рис. 3.6.2).
X2(p) = W1(p) X4(p), X3(p) = W2(p) X4(p).
X1(p) = X2(p)+X3(p) = (W1(p)+W2(p)) X4 (p).
W(p) = W1(p)+W2(p).
Из последнего выражения следует, что параллельное соединение звеньев эквивалентно одному звену с передаточной функцией, равной сумме передаточных функций, входящих в соединение звеньев. Переходная характеристика:
H(t) =  Hi(t).
Hi(t).
Построение переходной характеристики параллельного соединения заключается в построении переходных характеристик отдельных звеньев на одном графике и суммировании их ординат для одних и тех же значений времени.
Пример: ПИ-регулятор - параллельное соединение пропорционального (W1(p)=kп) и интегрирующего звеньев (kи/p). Передаточная функция
W(p) = (kпp + kи)/p.
 Рис. 3.6.3.
Рис. 3.6.3.
|
Система с отрицательной обратной связью. При встречно-параллельном соединении звеньев на вход звена кроме входной подается еще и выходная величина через специальное звено обратной связи. На рис. 3.6.3 звено W1(p) составляет прямую цепь, которая охвачена ОС, звеном W2(p). При этом если сигнал x3 вычитается из входного сигнала x4, то ОС называется отрицательной, а если суммируется, то ОС – положительная. Для отрицательной обратной связи можно записать:
X1(p) = W1(p) X2(p), X3(p) = W2(p) X1(p), X2(p) = X4(p) – X3(p).
Решая эти три уравнения относительно X1(p), находим:
X1(p) = X4(p) W1(p) /(1+ W1(p)W2(p)).
Передаточная функция
W(p) = W1(p) /(1+ W1(p)W2(p)). (3.6.1)
Полученная передаточная функция может интерпретироваться как передаточная функция последовательно соединенных звеньев с передаточной функцией W1(p) и системы с передаточной функцией:
Ф(p) = 1/(1+Wрс),
где Wрс = W1(p)W2(p) - передаточная функция разомкнутой системы, например, в точке “а”.
При охвате любого звена единичной ОС (т.е. при W2 (p) = 1) разомкнутая система преобразуется в замкнутую с передаточной функцией (из выражения (3.6.1)):
W(p) = W1(p) /(1+ W1(p)).
С другой стороны, если в выражении (3.6.1) обеспечить высокий коэффициент усиления в цепи прямой связи (W1(p) → ∞), то 1 в знаменателе можно пренебречь и свойства звена определяются только свойствами цепи ОС:
W(p) = 1/W2(p).
 Рис. 3.6.4.
Рис. 3.6.4.
|
Консервативное звено - двойной интегратор, имеющий передаточную функцию W1(p) = 1/p2, с отрицательной обратной связью, образованной пропорциональным звеном с W2(p) = 1/w2. Используя формулу (3.6.1), находим:
W(p) = 1/(p2+w2) = k/(T2p2 +1),
где k = 1/w2, T = 1/w.
Передаточные функции систем управления.
Система управления без обратной связи (разомкнутая система), состоящая из последовательно соединенных регулятора и объекта управления (рис. 3.6.5).
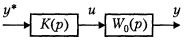 Рис. 3.6.5.
Рис. 3.6.5.
|
Пусть объект управления описывается операторным уравнением
Y(p) = Wo(p) U(p),
а регулятор представлен выражением
U(p) = K(p) y*(p),
где y(t) ↔ Y(p) - выходная переменная, u(t) ↔ U(p) - управляющее воздействие, y*(t) ↔ y*(p) - задающее воздействие (вход системы), Wo(p) и К(р) - передаточные функции (произвольные интегро-дифференциальные операторы).
Используя правило построения модели последовательно соединенных блоков, находим уравнение
y(t) ↔ Y(p) = W(p) y*(p),
связывающее выходную переменную y(t) и входную переменную через передаточную функцию разомкнутой системы W(p) = Wo(p)K(p).
Замкнутая система управления, т. е. система, представленная объектом управления и регулятором отклонения (рис. 3.6.6):
 Рис. 3.6.6.
Рис. 3.6.6.
|
U(p) = K(p)e(p),
e(p) ↔ e(t) = y*(t)-y(t),
где e(t) - рассогласование (отклонение). Используя правило (3.6.1), находим модель замкнутой системы в виде
Y(p) = W(p) y*(p),
W(p) = K(p)Wo(p) /(1+K(p)Wo(p)).
Замыкание системы приводит к изменению знаменателя ее передаточной функции - характеристического полинома системы, а, следовательно, и корней полинома (полюсов системы).
литература
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. - СПб.: Питер, 2005. - 336 с.
7. Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
9. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975.
14. Желтиков О.М. Основы теории управления. Конспект лекций. – Самара, СГТУ, 2008. – URL: http://www.jelomak.ru/pager.htm.
Тема 4. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Содержание
Введение.
1. Критерии устойчивости. Понятие устойчивости системы. Условие устойчивости САУ. Алгебраические критерии устойчивости. Критерий Рауса. Критерий Гурвица.
2. Частотные критерии устойчивости. Принцип аргумента. Критерий устойчивости Михайлова. Критерий устойчивости Найквиста.
3. Запас устойчивости систем. Понятие структурной устойчивости. Понятие запаса устойчивости. Анализ устойчивости по логарифмическим частотным характеристикам.
4. Точность систем. Статическая точность. Динамическая точность.
5. Качество систем. Показатели качества систем управления. Показатели качества переходного процесса. Последовательное корректирующее устройство. Параллельное корректирующее устройство. Метод Солодовникова. Программы анализа качества процессов управления.
6. Случайные процессы в системах. Модели случайных сигналов. Фильтрация помех. Фильтр Винера. Частотная характеристика фильтра.
Введение
Важнейшей задачей анализа динамических систем управления является решение вопроса об их устойчивости. Техническое понятие устойчивости систем автоматического управления отражает свойство технической системы не только стабильно работать в нормальных режимах, но и "не уходить вразнос" при отклонении всевозможных параметров системы от номинала и влиянии на систему дестабилизирующих воздействий, т. е. способности системе возвращаться к равновесному состоянию, из которого она выводится возмущающими или управляющими воздействиями. Устойчивость системы - техническое требование в ряду более сложных требований, связанных с показателями качества и точности САУ.
Date: 2016-07-25; view: 811; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |