Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Устройства для передачи движения в вакуум
Необходимость в устройствах для передачи в вакуум появляется в связи с тем, что привод механизмов удобнее размещать вне вакуумной камере. Это связано с трудностью или невозможностью обезгаживания приборов, а также с размещением элементов контроля: линеек, нониусов и т.д.
Устройства для передачи движения в вакуум делятся на три группы: 1) для передачи возвратно-поступательного движения; 2) для передачи качательного движения; 3) для передачи вращательного движения. Внутри каждой группы также возможна классификация по предельному давлению, передаваемому усилию, скорости перемещения, величине хода и т.д.
При конструировании любых вводов движения в вакууме следует стремиться, чтобы герметизирующий элемент не воспринимал передаваемых усилий, а направляющие и опоры были бы по возможности расположены вне вакуумной камеры. Для пар трения, размещённых в вакууме, следует принимать специальные меры против схватывания трущихся материалов. С этой целью в качестве смазки можно применять дисульфид молибдена МоS2, сульфидировать поверхности трения или использовать материалы, сильно отличающиеся по своим физическим свойствам, например, металл и керамику.
Для низкого и среднего вакуума используются сальниковые уплотнительные элементы из маслостойкой вакуумной резины или фторопласта, а для сверхвысокого вакуума — гибкие элементы (сильфоны диафрагмы). Также может использоваться передача движения через неподвижную перегородку.
Резина и сталь имеет большой коэффициент трения, и резиновые уплотнители подвижных соединений всегда нуждаются в смазке. Фторопласт может работать без смазки, но его износ во время работы должен компенсироваться установкой упругих дополнительных элементов.
Уплотнения для ввода поступательного движения в высокий и сверхвысокий вакуум изготавливаются полностью из металла и могут быть прогреты с целью обезгаживания до температуры 400–500ºC.
Магнитные вводы движения через неподвижную перегородку из немагнитного материала обладают максимальной герметичностью, т.к. в них отсутствуют подвижные вакуумные уплотнения. Их недостатками является трение в вакууме и ограниченная величина передаваемых усилий и кинематически нежёсткая передача.
Примеры наиболее широко применяемых сальниковых уплотнений приведены на рис. 5.11, 5.12. Такие уплотнения могут использоваться как для передачи вращения, так и передачи перемещения.
Так как фторопласт менее упруг, чем резина, и имеет значительную остаточную деформацию, для компенсации износа и обеспечения плотного контакта уплотняющей фторопластовой втулки 1 (рис. 5.12) с подвижным полированным валом 5 используются упругие свойства резиновых колец 2, предварительно деформированных с помощью нажимной гайки 4 и втулки 3.

| 
|
| Рис. 5.11. Сальниковые уплотнение типа Вильсона для передачи вращательного движения в вакууме: 1 — прокладки из резины или фторопласта; 2 — металлические шайбы | Рис. 5.12. Устройства для ввода вращения с использованием фторопластовой втулки: 1 — фторопластовая втулка; 2 — резиновые кольца; 3 — втулка; 4 — нажимная гайка; 5 — полированный вал |
Схема конструкций вводов поступательного движения с металлическим сильфоном и постоянным магнитом приведены на рис. 5.13а, б.
Величина перемещения в устройстве 5. 13а ограничена только количеством гофров и эластичностью сильфона.
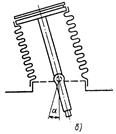
Схемы вводов качательного движения в вакууме, показаны на рис. 5.14. Они имеют угол качания α в мембранных вводах не более 10°, а в сильфонных — 30°. Для получения больших углов качания необходимы ускорительные передачи или вводы вращательного движения. Возможно применение поступательных вводов с последующим преобразованием поступательного движения в качательное. Схемы некоторых конструкций вводов вращения представлены на рис. 5.15.
Вводы вращения с пространственным шарниром и планетарной зубчатой передачей применяются для передачи значительных крутящих моментов.
 а)
а)
|  б)
б)
|
Рис. 5.13. Схема вводов поступательного движения с металлическим сильфоном (а) и постоянным магнитом (б)

| 
|
Рис. 5.14. Схемы вводов качательного движения в вакуум:
а) мембраны; б) сильфоны

| 
| 
|
| a) | б) | в) |
Рис.5.15. Схемы конструкций вводов вращения:
а) с пространственным шарниром; б) с планетарной зубчатой передачей;
в) с постоянным магнитом
Магнитный ввод-вращение в вакуум применяется в высоковакуумных системах для передачи вращательного движения с большой частотой вращения и малым крутящим моментом. Он может быть сделан прогреваемым, но не обеспечивает кинематической жёсткости передачи.

Рис. 5.16. Устройство для передачи вращательного движения
с использованием сильфонного уплотнения
В экспериментальных вакуумных установках в основном применяются вводы-вращения пример, которого представлен на рис. 5.16. Они имеют средние показатели по передаваемым крутящим моментам и скоростям вращения.
Date: 2016-06-06; view: 2161; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |