Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Меры борьбы с реакцией якоря
Электрическое оборудование
Электрические
Машины
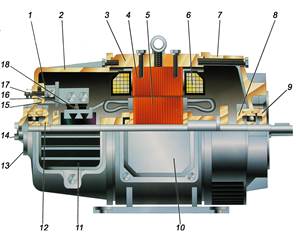
Общее устройство двигателей постоянного тока
Состоит из:
1. Остова 3, который служит для крепления главных 4 и дополнительных полюсов, подшипниковых щитов 2, щеточных механизмов 1, а также является частью магнитопровода. К остову крепится клеммная коробка 10.
2. Подшипниковых щитов 2 и 7, служащих для крепления подшипников в которых вращается вал 14 якоря. Подшипники закрываются уплотнительными крышками 8,9 и 12,13, как изнутри, так и снаружи. Щиты могут иметь вентиляционные отверстия или окна 11.
3. Главных полюсов 4 и 6, предназначенных для создания основного магнитного потока.
4. Дополнительных полюсов, служащих для уменьшения реакции якоря и улучшения коммутации.
5. Якоря 5.
 - предназначенного для создания вращающего момента в двигателе,
- предназначенного для создания вращающего момента в двигателе,
- в генераторах – для создания индуктированной ЭДС.
6. Коллектора 18.
- в двигателях служит для распределения токов по виткам обмотки якоря таким образом, чтобы вращающие моменты всех витков были направлены в одну сторону.
- в генераторах коллектор выполняет функцию выпрямителя.
7. Щеточного механизма с фиксатором 15 и 16, кронштейном 1, щеткодержателем 17.
- в двигателях – для подачи напряжения на обмотку якоря.
- вгенераторах – для снятия напряжения с обмотки якоря.
Принцип действия двигателей постоянного тока
Принцип действия двигателей постоянного тока основан на явлении выталкивания проводника с током из магнитного поля полюсов. При подаче напряжения на обмотку возбуждения и обмотку якоря двигателя, обмотка возбуждения создает основной магнитный поток в котором будут находиться проводники с током обмотки якоря. При этом на проводники с током обмотки якоря действуют выталкивающие силы, определяемые по правилу левой руки. Эти силы создают вращающие моменты витков, они направлены в одну сторону, поэтому складываются и образуют общий вращающий момент Мвр двигателя
Мвр = СФIя (1)
где:
С – конструктивная постоянная машины, зависит от количества длины и диаметра витков и т.д.
Ф – основной магнитный поток, созданный полюсами машины.
Iя – ток якоря.
Под действием вращающего момента якорь двигателя начинает вращаться, при этом на его вал будут действовать силы сопротивления: трение о воздух, трение в подшипниках, сопротивление от рабочего механизма. Эти силы создают момент сопротивления Мс, направленный встречно вращающему моменту.
Существует 3 режима работы двигателя:
-
 Мвр > Мс, тогда частота вращения якоря n – увеличивается.
Мвр > Мс, тогда частота вращения якоря n – увеличивается. - Мвр < Мс, n – уменьшается.
- Мвр = Мс, n – постоянная.
При вращении якоря его проводники пересекают магнитные силовые линии магнитного поля полюсов, поэтому в них индуцируется ЭДС. ЭДС всех витков складывается и образуется общая ЭДС машины - Е.
Е = СФn (2)
Данная ЭДС зависит от конструктивной постоянной машины (С), основного магнитного потока (Ф) и от частоты вращения якоря (n). Эта ЭДС в двигателе направлена против тока якоря и определяется по правилу правой руки, поэтому ее называют противоЭДС и она направлена встречно приложенному к обмотке якоря напряжению.
В двигателях напряжение всегда больше противоЭДС, а значит напряжение будет расходоваться на преодоление противоЭДС и на падение напряжения в обмотке якоря, что выражается формулой
U = Е + IяRя (3)
Из этой формулы можно вывести закон Ома для двигателей постоянного тока
Iя = (U – Е) / Rя (4)
Для определения от чего зависит частота вращения двигателя, воспользуемся формулой (2). Так как противоЭДС невозможно измерить никакими приборами, то ее можно математически выразить из формулы (3)
Е = U – IяRя (5)
Подставляя в формулу (5) вместо противоЭДС ее математическое выражение, получаем окончательную формулу зависимости частоты вращения
n = (U – IяRя) / СФ
Принцип саморегулирования двигателей постоянного тока
Допустим, поезд следует по ровной площадке с постоянной скоростью, на одной и той-же позиции: U = const и при этом Мвр = Мс.
Если поезд пошел на подъем, то при этом Мс увеличится и станет больше Мвр, соответственно частота вращения ТЭД (n) уменьшится, а также уменьшится и ЭДС (Е). Ток якоря Iя и Мвр увеличиваются. Мвр будет увеличиваться до тех пор, пока не сравняется с моментом сопротивления (Мс) и далее поезд пойдет на подъем с постойной, но уже меньшей скоростью.
Если поезд пойдет на спуск, то Мс уменьшится и станет меньше Мвр, тогда n и Е увеличатся, а
Iя и Мвр уменьшаются до тех пор, пока Мвр = Мс и далее поезд пойдет на спуск с постойной, но уже большей скоростью.
Выравнивание Мвр и Мс – называется саморегулированием.
Способы пуска двигателей в ход
I. Прямой. Когда к двигателю прикладывается напряжение Uн в момент пуска равное номинальному. Так как в момент пуска Е = 0, а сопротивление обмотки якоря очень мало, то при подаче Uн тяговый двигатель будет потреблять огромный ток, в десятки раз превышающий номинальное значения тока Iн. Поэтому, прямой пуск ТЭД на локомотивах не применяется.
II. Реостатный. Применяется на локомотивах постоянного тока. В момент пуска все двигатели соединяются последовательно, и последовательно с ними соединяется реостат. По мере разгона ток в двигателях уменьшается, поэтому для поддержания среднего значения тока реостат по секционно выводят (выключают). Как только реостат будет полностью выведен, для дальнейшего разгона двигатели соединяют последовательно - параллельно и снова выводят реостат.
Достоинства:
ü Не дорогая пускорегулирующая аппаратура.
ü Простая схема исполнения.
Недостатки:
ü Способ не экономичный, требует больших потерь энергии в пусковых сопротивлениях.
ü Малое число ходовых позиций.
III. Трансформаторный. Применяется на электроподвижном составе переменного тока. Питание ТЭД осуществляется от силового трансформатора, вторичная обмотка которого составлена из нескольких секций. В момент пуска напряжение на ТЭД подается от одной секции и далее, по мере разгона поезда, число секций будет увеличиваться – увеличивая напряжение на ТЭД.
Достоинства:
ü Способ экономичен и теоретически все позиции могут быть ходовыми.
Недостатки:
ü Способ дорогостоящий – из-за использования силового трансформатора.
IV. Комбинированный. Применяется на не модернизированных локомотивах переменного тока. В момент пуска в цепь ТЭД дополнительно включается пусковое сопротивление, которое ограничивает пусковой ток.
V. Тиристорный. Возможна плавная регулировка напряжения, соответственно исключены броски тока. Поезд будет более плавно разгонятся и будет более экономичен. Применяется на современных локомотивах. Напряжение, подаваемое на ТЭД, плавно регулируется за счет изменения времени отпирания тиристоров – импульсное регулирование.
Способы регулирования частоты вращения ТЭД
Основной способ регулирования частоты вращения ТЭД осуществляется за счет изменения напряжения, питающего двигатель. При достижении номинального напряжения на ТЭД, дальнейший разгон электровоза осуществляется за счет изменения магнитного потока (уменьшение магнитного поля полюсов, или ослабление возбуждения).
n = (U – IяRя) / СФ
Для этого параллельно обмотке возбуждения ТЭД подключаются резисторы ослабления поля, при этом:
1) Если ослабление поля происходит на высоких позициях контроллера, то Ф уменьшается в меньшей степени, чем увеличивается ток якоря Iя, поэтому Мвр увеличивается, что обеспечивает дальнейший разгон электровоза.
2) Если производить ослабление поля на низких позициях, то Ф уменьшается в большей степени, чем увеличивается Iя, поэтому Мвр в этом случае уменьшится и приведет к замедлению электровоза.
Реверсирование тяговых двигателей
Существует два способа реверсирования двигателей постоянного тока:
- За счет изменения направления тока в обмотке якоря.
- За счет изменения направления тока в обмотке возбуждения.
На ВЛ-80с для реверсирования ТЭД применяется только 2-й способ, так как падение напряжения на обмотке возбуждения значительно меньше, чем на обмотке якоря, поэтому раствор между разомкнутыми контактами реверсора рассчитывается на меньшее напряжение, что приводит к снижению габаритов реверсора.
Принцип действия генератора постоянного тока
Принцип действия генератора постоянного тока основан на использовании явления электромагнитной индукции. При вращении якоря, его витки пересекают магнитные силовые линии, и в них индуктируется ЭДС. ЭДС витков складываются и образуют генераторную ЭДС.

Ег = СФn
Если к якорю генератора подключить потребитель, то под действием ЭДС по якорю генератора и потребителю потечет ток, этот ток совпадает по направлению с генераторной ЭДС. Так как витки с током якоря генератора находятся в магнитном поле полюсов, то на проводники витков действуют выталкивающие силы, которые создают электромагнитный момент Мт, направленный встречно вращению якоря, поэтому он является тормозным моментом машины.
Мт = СФIя
Значит, для получения электрической энергии от генератора, нужно вращать его якорь постороннем двигателем (дизелем).
Свойства обратимости электрических машин
При рассмотрении принципа действия двигателя и генератора видно, что используются одни и те же электромагнитные явления. Поэтому, следует, что любой двигатель может быть использован в качестве генератора и наоборот. Значит, можно говорить, что электрическая машина работает, как в двигательном, так и в генераторном режимах.
Типы двигателей
В зависимости от способа соединения обмотки якоря с обмоткой возбуждения различают 4-е типа двигателей:
1. С независимым возбуждением.
2. С параллельным возбуждением.
3. С последовательным возбуждением.
4. Со смешанным возбуждением.
Электромеханическая характеристика двигателей постоянного тока
Электромеханическая характеристика двигателей постоянного тока – это графическая зависимость частоты вращения и вращающего момента от тока двигателя, при условии, что напряжение подаваемое на двигатель постоянное.
n = f(Iя),
Мвр = f(Iя).
U = const.
Изменение тока двигателя при снятии таких характеристик осуществляется за счет изменения механической нагрузки на валу якоря.
Характеристики двигателя с параллельным возбуждением (шунтовой).
 Так как напряжение – величина постоянная, то ток возбуждения Iв и основной магнитный поток Ф у данного двигателя при снятии характеристики изменяться не будут и поэтому вращающий момент Мвр будет прямо пропорционален зависеть от тока якоря. Частота вращения n при изменении механической нагрузки на валу меняется незначительно, только за счет изменения падения напряжения в обмотке якоря. Такая характеристика называется «жесткой» или мало изменяющейся. При частоте вращения nкр ток якоря равен 0, то есть U = Е. Если частота вращения будет больше nкр, то двигатель автоматически перейдет в генераторный режим.
Так как напряжение – величина постоянная, то ток возбуждения Iв и основной магнитный поток Ф у данного двигателя при снятии характеристики изменяться не будут и поэтому вращающий момент Мвр будет прямо пропорционален зависеть от тока якоря. Частота вращения n при изменении механической нагрузки на валу меняется незначительно, только за счет изменения падения напряжения в обмотке якоря. Такая характеристика называется «жесткой» или мало изменяющейся. При частоте вращения nкр ток якоря равен 0, то есть U = Е. Если частота вращения будет больше nкр, то двигатель автоматически перейдет в генераторный режим.
Iя = (U – Е) / Rя, n = (U – IяRя) / СФ, Мвр = СФIя
Характеристики двигателя с последовательным возбуждением (сериестный).
У данного двигателя ток якоря равен току возбуждения, поэтому Мвр данного двигателя зависит от квадрата тока якоря. При увеличении механической нагрузки на валу частота вращения данного двигателя уменьшается значительно по следующим причинам:
ü Из-за увеличения, в основном, магнитного потока полюсов Ф.
ü За счет увеличения падения напряжения в обмотке якоря.
 Такая характеристика является «мягкой» и двигатель не может автоматически переходить в генераторный режим, поэтому, при малых механических нагрузках на валу, двигатель идет в разнос – n резко увеличивается. Двигатели с последовательным возбуждением запрещается запускать без механической нагрузке на валу якоря.
Такая характеристика является «мягкой» и двигатель не может автоматически переходить в генераторный режим, поэтому, при малых механических нагрузках на валу, двигатель идет в разнос – n резко увеличивается. Двигатели с последовательным возбуждением запрещается запускать без механической нагрузке на валу якоря.
Сравнение двигателей с различными типами возбуждения для их применения
в качестве тяговых
- Сравнение по пусковому и вращающему моменту. Так как у сериесного двигателя Мвр зависит от квадрата тока якоря, поэтому, при одном и том же токе якоря сериесный двигатель будет развивать больший Мвр и пусковой момент, чем шунтовой.
- Сравнение по перегрузочной способности. При одном и том же пусковом и вращающем моментах, сериесный двигатель потребляет меньший ток чем шунтовой, поэтому меньший нагрев обмоток двигателя и он обладает большей перегрузочной способностью.
- Сравнение по разнице диаметров бандажей колесных пар. Так как допускается разница диаметров бандажей, то двигатели будут вращаться с разной частотой. Даже если двигатели имеют одинаковые характеристики, то они будут потреблять разные токи и соответственно, разница токов у сериесных двигателей значительно меньше из-за мягкости характеристик.
- Сравнение по разнице характеристик ТЭД. Из-за технологических допусков двигатели имеют различные характеристики. Допускается отклонение частоты вращения при номинальных условиях до 4%, поэтому, даже при одинаковых диаметрах бандажей колесных пар ТЭД потребляют разные токи и у сериесных двигателей эта разница токов меньше чем у шунтовых.
- Сравнение по броскам напряжения в контактной сети. Броски напряжения в контактной сети возникают, например, при отключении ГВ одной из секций в режиме тяги, при этом к остальным ТЭД прикладывается большее напряжение, то есть они переходят на более высокоскоростную характеристику. Так как частота вращения ТЭД мгновенно изменится не может, то в двигателях происходит бросок тока и у сериесных ТЭД эти броски тока значительно меньше чем у шунтовых.
- Сравнение по механической прочности катушек полюсов. У сериесных двигателей по катушкам полюсов проходит значительный электрический ток, поэтому для создания основного Ф большого количества витков не требуется. Катушки полюсов выполняют из шинной меди большего сечения. Такие катушки более механически прочные, что имеет преимущества при ремонте машины.
- По способности ТЭД автоматически переходить в генераторный режим. Шунтовой двигатель может автоматически переходить в генераторный режим, сериесный двигатель не может перейти в генераторный режим, а при малых нагрузках идет в разнос.
- По склонности к буксованию. В начале буксования у шунтовых двигателей n увеличивается незначительно, а кроме того, при частоте вращения якоря более nкр шунтовой двигатель переходит в генераторный режим – тормозной. Этот двигатель менее склонен к буксованию.
 Обмотка якоря
Обмотка якоря
Вся обмотка якоря состоит из секций. Все секции между собой соединены последовательно, и конец последней секции соединен с началом первой. Секции бывают одновитковые и многовитковые.
- Активные части витка.
- Лобовая часть витка.
- Лобовые изгибы.
- Коллекторные пластины.
- Изоляция (миканит).
В тяговых двигателях секции делают одновитковые, поэтому, будем считать секцию и виток одним и тем же. Активные части укладываются под разноименными полюсами машины.
Типы обмоток якоря
Простая петлевая обмотка. При данном типе обмотки у электрической машины количество параллельных ветвей в обмотке якоря равно количеству полюсов и количеству щеток. Применяется в электрических машинах рассчитанных на относительно большой ток, создают и выдерживают относительно не высокое напряжение.
Простая волновая обмотка. У данной обмотки количество параллельных ветвей всегда равно двум, независимо от количества полюсов. Машины с таким типом обмотки рассчитаны на относительно небольшой ток и высокое напряжение.

 Реакция якоря
Реакция якоря
Для характеристики магнитного поля электрической машины существует понятия:
Геометрическая нейтраль – это линия, перпендикулярная оси полюсов и проходящая через середину расстояния между ними.
 Физическая нейтраль – это линия перпендикулярная основному магнитному потоку и проходящая через середину расстояния между полюсами.
Физическая нейтраль – это линия перпендикулярная основному магнитному потоку и проходящая через середину расстояния между полюсами.
Реакция якоря – это воздействие магнитного поля якоря на основное магнитное поле полюсов машины.
Из-за реакции якоря основное магнитное поле полюсов искажается, то есть, под одним краем полюса магнитное поле усиливается, а под другим краем – ослабляется, соответственно происходит поворот физической нейтрали относительно геометрической.
Вредные последствия реакции якоря
1. Размагничивающее действие – при усилении магнитного поля под одним краем полюса, этот край полюса доходит до магнитного насыщения, поэтому из-за реакции якоря магнитное поле ослабляется в большей степени под одним краем, чем усиливается под другим. Соответственно, основной магнитный поток Ф уменьшится, что приводит и к уменьшению Мвр и Ег.
2. Ухудшение коммутации из-за поворота физической нейтрали относительно геометрической. Коммутируемая секция на геометрической нейтрали пересекает магнитные силовые линии, при вращении якоря, и в секции индуктируется ЭДС вращения, которая способствует увеличению искрения под щетками.
3. Увеличение вероятности возникновения кругового огня по коллектору. При вращении якоря витки проходят через сгущение магнитных силовых линий, поэтому под одним краем полюса индуктируется большая ЭДС, а значит, увеличивается напряжение между двумя соседними коллекторными пластинами, что может привести к пробою воздушной изоляции между пластинами коллектора и как следствие – к круговому огню по коллектору (переброс). Круговой огонь – это мощная электрическая дуга по коллектору, которая замыкает две разноименные щетки между собой.
Меры борьбы с реакцией якоря
- Для электрических машин всех мощностей увеличивают воздушный зазор между якорем и краями полюсов, при этом основной магнитный поток Ф будет смещаться к центру полюсов.
- В машинах большой и средней мощности устанавливают дополнительные полюса.
- В машинах большой мощности в специальные пазы главных полюсов устанавливают компенсационную обмотку.
- Для автоматизации мер борьбы с реакцией якоря катушку дополнительных полюсов и компенсационную обмотку подсоединяют последовательно к обмотке якоря.
Коммутация
Процесс переключения секций обмотки якоря из одной параллельной ветви в другую, называют коммутацией.
Секция, которая в процессе переключения (коммутации) замыкается щеткой накоротко, называется коммутируемой секцией.
В коммутируемой секции ток меняется как по величине, так и по направлению. Процесс коммутации может сопровождаться искрением под щетками. Причины искрения разделяются на 2 вида:
I. Механические.
II. Электромеханические.
Механические причины искрения возникают из за:
ü Слабого нажатия щеток на коллектор.
ü Износа щеток более нормы.
ü Сколов на щетках.
ü Повышенного износа рабочей поверхности коллектора.
ü Биения коллектора.
ü Загрязнения коллектора.
Данные причины искрения устраняются при ремонте электрической машины: смена щеток, обточка и продорожка коллектора, балансировка якоря.
Электромеханические причины искрения возникают в процессе коммутации, так как в переключаемой секции возникают следующие ЭДС:
Ø ЭДС самоиндукции е L возникает из-за быстрого изменения тока, как по величине, так и по направлению в коммутируемой секции.
Ø ЭДС взаимоиндукции ем, так как ширина щетки в 3-4 раза больше ширины коллекторной пластины, поэтому в процессе коммутации одновременно участвуют несколько соседних секций.
Ø ЭДС вращения е вр возникает из-за реакции якоря.
Ø ЭДС пульсации е пульс возникает из-за зубчатого строения сердечника якоря, так как воздушный зазор между якорем и полюсом постоянно меняется.
Ø ЭДС трансформации е тр, так как на электровозах переменного тока ТЭД питаются не постоянным а пульсирующим током, то и будет пульсировать основной магнитный поток Ф, созданный обмоткой возбуждения.
Все эти ЭДС направлены согласно, поэтому складываются, а так как коммутируемая секция замыкается щеткой накоротко, то под действием суммарной ЭДС возникает ток коммутации i к.
iк. = ( еL + ем + евр + епульс + етр ) / R к.с.,
где R к.с – сопротивление самой секции, плюс сопротивление коллекторных пластин, плюс сопротивление перехода между щеткой и коллектором.
Ток коммутации вызывает искрение под щетками по причинам:
- Хотя процесс коммутации происходит быстро. Но он не успевает закончится, когда щетка сбегает с коллекторной пластины и происходит разрыв цепи тока коммутации.
- Под одним краем щетки из-за тока коммутации плотность тока увеличина, что приводит к искрению, поэтому для уменьшения искрения под щетками, необходимо уменьшить i к. Это осуществляется за счет конструктивных особенностей двигателя и за счет дополнительных электрических аппаратов, включенных в схему питания ТЭД.
Date: 2016-05-25; view: 3237; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |