Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основные параметры передач механических приводов
Передачи служат для изменения скорости, крутящего момента, траектории или характера движения, направления движения (реверсирование), плоскости движения и других параметров.
Механические передачи, обеспечивающие работу нескольких механизмов от одного двигателя (одномоторный привод), имеют несколько реверсивных устройств, соединительных муфт и тормозов. Пример такого привода показан на рис. 34.
Через коробку передач и коробку отбора мощности от двигателя автомобиля вращение передается вертикальному валу I, далее через конические зубчатые колеса — горизонтальному валу распределительного механизма 2, грузовой лебедке III, лебедке раздел третий ПРИВОДЫ МАШИН
Глава VI МЕХАНИЧЕСКИЕ ПРИВОДЫ
§ 20. ОСНОВНЫЕ ПАРАМЕТРЫ ПЕРЕДАЧ МЕХАНИЧЕСКИХ ПРИВОДОВ
Передачи служат для изменения скорости, крутящего момента, траектории или характера движения, направления движения (реверсирование), плоскости движения и других параметров.
Механические передачи, обеспечивающие работу нескольких механизмов от одного двигателя (одномоторный привод), имеют несколько реверсивных устройств, соединительных муфт и тормозов. Пример такого привода показан на рис. 34.
Через коробку передач и коробку отбора мощности от двигателя автомобиля вращение передается вертикальному валу I, далее через конические зубчатые колеса — горизонтальному валу распределительного механизма 2, грузовой лебедке III, лебедке раздел третий ПРИВОДЫ МАШИН
Глава VI МЕХАНИЧЕСКИЕ ПРИВОДЫ
§ 20. ОСНОВНЫЕ ПАРАМЕТРЫ ПЕРЕДАЧ МЕХАНИЧЕСКИХ ПРИВОДОВ
Передачи служат для изменения скорости, крутящего момента, траектории или характера движения, направления движения (реверсирование), плоскости движения и других параметров.
Механические передачи, обеспечивающие работу нескольких механизмов от одного двигателя (одномоторный привод), имеют несколько реверсивных устройств, соединительных муфт и тормозов. Пример такого привода показан на рис. 34.
Через коробку передач и коробку отбора мощности от двигателя автомобиля вращение передается вертикальному валу I, далее через конические зубчатые колеса — горизонтальному валу распределительного механизма 2, грузовой лебедке III, лебедке IV подъема и опускания стрелы и другим механизмам.
На рис. 35 показаны кинематические схемы механизмов автомобильного крана с дизель-электрическим приводом, получающих вращение от индивидуальных двигателей (индивидуальный или многомоторный привод). Несмотря на большое число двигателей и редукторов, такие приводы имеют высокую степень ремонтопригодности и более просты в эксплуатации.
Основными параметрами передач являются коэффициент полезного Действия (КПД) и передаточное число.
КПД передачи определяется отношением полезной работы, выполняемой машиной, к работе А1 движущих сил:
В общем случае работа
где р—действующая сила; S—путь, проходимый телом под действием силы; а—угол между направлением движения тела и направлением действия силы.
КПД можно определить как отношение мощности N2 на ведомом валу И Мощности Nx на ведущем валу:
Рнс. 34. Кинематическая схема крана с приводом от одного двигателя:
1 — механизм поворота; 2 — распределительный механизм; 3,4,8 — реверсы стреловой, грузовой лебедок и механизма поворота; 5 — гидронасос; 6, 7 — грузовая и стреловая лебедки.
При этом мощность (кВт)
где v — скорость, м/с; Р—действующая сила,
Н. При вращательном движении
где v — в м/с; D — диаметр окружности, по касательной к которой действует сила Р, м;
n — частота вращения вала, об/мин.
Рис. 35. Кинематическая схема автомобильного крана с многомоторным приводом:
а — привод генератора; б —механизм управления челюстями грейфера; в- механизм нения вылета стрелы; г — механизм подъема грейфера; д — механизм поворота.
Общий КПД равен произведению КПД элементов передач:
Передаточным числом передачи i называется отношение угловой скорости со. ведущего вала к угловой скорости со, ведомого вала:
угловая скорость (1/с)
Передаточное число определяется также формулами
где n1 и n2 — частота вращения ведущего и ведомого валов соответственно; М2 и М1 — крутящие моменты на ведомом и ведущем валах; n — КПД передачи от ведущего к ведомому валу. Крутящий момент (Нм)
где Р — окружное усилие, Н; N — мощность на валу, кВт; n — частота вращения вала, об/мин.
Передаточным числом кинематической пары называется также отношение диаметра (радиуса) ведомого колеса к диаметру (радиусу) ведущего, для зубчатой и цепной передачи—отношение числа зубьев z2 на ведомой шестерне или звездочке к числу зубьев z1 на ведущей, для червячной передачи— число зубьев z червячного колеса к числу заходов ах червяка:
Передаточное число системы передач равно произведению передаточных чисел отдельных ее пар:
Пример 8. Определить кинематические параметры механизмов железнодорожного крана (рис. 36).
Данные. Железнодорожный кран с дизель-электрическим многомоторным приводом состоит из ходовой части, перемещающейся по рельсовому пути, и поворотной платформы, на которой смонтированы стрела, силовое оборудование, грузовая и стреловая лебедки, механизм поворота, контргруз и кабина машиниста. Численные значения параметров приведены на Рисунке.
Решение. Определим скорости рабочих движений крана по данным, приведенным на кинематической схеме.
Механизма передвижения
Частота вращения (об/мин):
барабана грузовой лебедки
барабана стреловой лебедки
ходовых колес
где nдв— частота вращения вала двигателя, об/мин.
Скорость, (м/с):
навивания канатов на барабаны лебедок
передвижения крана
- диаметры барабанов грузовой и стреловой лебедок и ходовых колес соответственно, м.
ПЛАНЕТАРНЫЕ И ВОЛНОВЫЕ ПЕРЕДАЧИ
Планетарные передачи позволяют получать большие передаточные числа при небольшом количестве зубчатых колес и небольших габаритных размерах, легко разветвлять и складывать потоки мощности; обеспечивают передачу вращения на ведомый вал от нескольких источников энергии и от одного ведущего вала на несколько ведомых.
В планетарных передачах зубчатые колеса вращаются не только относительно своих осей, но и относительно центральной оси передачи. Колеса, совершающие такое сложное движение, называются сателлитами. Центральное колесо, вокруг которого вращаются сателлиты, называется солнечным, а колесо, внутри которого вращаются сателлиты — венцом, или эпициклом.
Оси сателлитов закрепляют на одном звене, называемом водилом.
Для выявления соотношений между скоростями звеньев планетарной передачи пользуются планом скоростей (рис. 37).
Построению плана скоростей предшествует определение окружной скорости какого-либо основного звена по заданной частоте его вращения.
Основными называются звенья, оси которых совпадают с центральной осью, к этим звеньям могут быть приложены внешние моменты. Для схемы, изображенной на рис. 37, основными звеньями являются солнечная шестерня, водило и венец.
Окружная скорость (м/с) солнечной шестерни
где D1 = 2.R1 — диаметр солнечной шестерни, м; n — частота вращения солнечной шестерни, об/мин; ω—угловая скорость солнечной шестерни, 1/с. Угловая скорость солнечной шестерни
Отложим от точки О' в определенном масштабе по горизонтали скорость v1 и поставим точку С.
Окружная скорость венца v3 = 0, так как венец неподвижен. На плане скоростей на окружности венца ставим точку В на вертикальном радиусе. Соединив точку В и С, получим линию ВС—распределение линейных скоростей по диаметру сателлита.
Рис. 37. Построение плана скоростей звеньев планетарной передачи при остановленном венце:
1- солнечная шестерня; 2 — сателлит; 3 — венец; 4 — водило
Окружная скорость центра сателлита О2 является окружной скоростью водила v4. Линия О1С представляет распределение окружных скоростей солнечной шестерни по радиусу R1.
Угловая скорость водила
Передаточное число при остановленном венце
Это же передаточное число можно определить графически. Проведем за радиусом О1В от любой точки А горизонтальную прямую и продолжим линии О1С и ОlF до пересечения с ней. Получим точки D и Е. При этом передаточное число
.
Графический метод определения передаточного числа хотя и дает наглядное представление, но не обеспечивает необходимой точности при расчетах.
Если представить, что водило остановлено, то угловые скорости солнечного колеса и венца будут только относительными:
Знак минус означает, что звенья 1 и 3 вращаются в разных направлениях. При вращении водила
где I’—передаточное число в относительном движении.
После преобразований получим основное уравнение кинематики
При неподвижном венце (ω3 = 0) и ведущем солнечном колесе
ω.
При этом передаточное число планетарной передачи
При неподвижном солнечном колесе (ω1= 0) и ведущем венце
Обычно
Если ведущим звеном является водило, то
При неподвижном водиле (ω4 = 0) и ведущем солнечном колесе
Рис. 38. Двойная планетарная передача
Передаточное число многорядных планетарных редукторов определяется совместным решением основных уравнений кинематики, составленных для элементов каждого ряда.
Передаточное число двойной планетарной передачи (рис. 38) характеризуется следующими основными уравнениями кинематики:
где i’1 i’2 — передаточные числа первой и второй передач в относительном движении
При этом
Так как венцы 31и 32 неподвижны,
Заменив ω4l на ωl2, получим
Передаточное число двойной планетарной передачи
Планетарные передачи можно разделить на три группы:
простые—солнечное колесо или венец неподвижны;
замкнутые—два из трех основных звеньев связаны между собой дополнительной замыкающей передачей;
дифференциальные—подвижны все три основных звена.
Передаточное число замкнутой планетарной передачи (рис. 39, а) можно определить, решая основные уравнения кинематики для обоих рядов:
Рис. 39. Планетарная передача:
а- замкнутая; б – дифференциальная
Подставляя в уравнение (18) значения угловых скоростей звеньев из выражений (20), получим
Из уравнения (19) находим
Тогда
Дифференциальные передачи (рис. 39, б) применяют для кинематической связи между тремя валами, причем скорости двух валов могут изменяться.
Автомобильные дифференциалы обеспечивают различные угловые скорости ведущих колес при повороте автомобиля и движении его по неровностям дороги.
Основное уравнение кинематики для дифференциальной передачи имеет
вид
Из этого уравнения находим
Волновые зубчатые передачи являются разновидностью планетарных.
Передача (рис. 40) состоит из волнового генератора 1 (водила с двумя роликами), гибкого колеса 2 с наружными Зубьями и жесткого неподвижного колеса 3 с внутренними зубьями.
Вращательное движение в волновой зубчатой передаче осуществляется путем волновой деформации гибкого зубчатого колеса, выполненного в форме цилиндрического стакана. В передаче с двумя роликами, образуется две бегущие волны, с тремя—три.
Разность чисел зубьев жесткого zж и гибкого zr зубчатых колес принимается равной числу волн к:
Передаточное число волновой передачи
Волновые передачи позволяют передавать вращение при передаточных числах до 350, а в отдельных случаях до нескольких тысяч.
Рис. 40. Волновая передача
 Большое число зубьев, одновременно находящихся в зацеплении, обеспечивает передачу больших усилий при незначительных габаритных размерах элементов передачи.
Большое число зубьев, одновременно находящихся в зацеплении, обеспечивает передачу больших усилий при незначительных габаритных размерах элементов передачи.
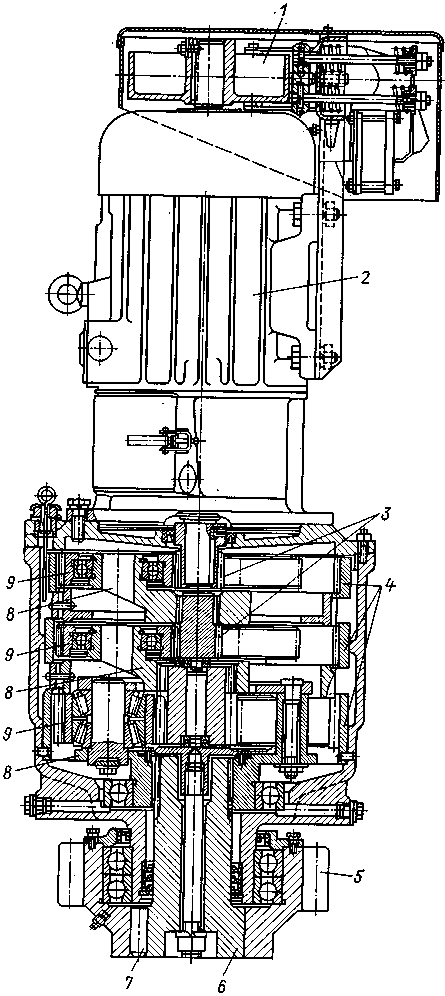
Рис. 41. Механизм поворота башенного крана
Малые. скорости скольжения в зацеплении обеспечивают высокий КПД и незначительный износ зубьев. Недостатками волновых передач являются сложность конструкции, невысокий срок службы гибкого колеса.
Перечисленные особенности планетарных и волновых передач обеспечили широкое внедрение их в приводные устройства строительных и; дорожных машин.
Механизм поворота башенного крана (рис. 41) включает двухколод очный тормоз 1, электродвигатель 2 и планетарный редуктор с тремя передачами. Центральная солнечная шестерня 3 каждой передачи передает вращение шестерням-сателлитам 9, установленным на водилах 8. На каждом водиле свободно установлено по три сателлита. Последние находятся в зацеплении с зубчатыми венцами 4 и вместе с водилами совершают планетарное движение относительно солнечных шестерен. Выходной вал 6 разгружен от радиальных нагрузок. Приводная шестерня 5 поворотного механизма установлена на радиальных подшипниках корпуса редуктора и закреплена на валу штифтами 7. При сравнительно малой Массе и небольших габаритных размерах планетарный редуктор обеспечивает передаточное число, равное 258.
Рис. 42. Кинематическая схема многоскоростной лебедки с планетарным механизмом
Использование в крановых лебедках планетарных механизмов позволяет получать несколько различных скоростей. Так, лебедка крана БК 1000 (рис. 42) благодаря установке двух электродвигателей и планетарной передачи обеспечивает четыре различных скорости-навивки каната на барабан, причем минимальная и максимальная скорости различаются в 5—10 раз.
Дифференциалы и планетарные передачи с неподвижными зубчатыми венцами часто используют в движителях самоходных пневмоколесных машин (рис. 43). Вращение от трансмиссии передается шестерне 7 главной передачи, к которой прикреплено водило с осями 8 сателлитов, находящихся в зацеплении с солнечными шестернями 9 дифференциала. Солнечные шестерни 1 планетарных передач, встроенных в ходовые колеса, передают вращение сателлитам 2, обегающим неподвижный венец 3. При этом вращение передается ступицам 4 с тормозными барабанами 5 и пневмоколесами 6. Аналогичные планетарные передачи встраивают в мотор колеса с гидравлическими или электрическими двигателями. Планетарные редукторы, размещаемые внутри приводных барабанов ленточных конвейеров и грузовых лебедок, позволяют существенно снизить металлоемкость приводных систем. Применение планетарных механизмов в конструкция роторных бетоносмесителей обеспечивает интенсификацию процесса приготовления качественных смесей.
Рис. 44. Схема волновой передачи крана
Волновые передачи позволяют создавать приводы с большими передаточными числами, что существенно упрощает конструкцию приводного механизма. Использование в механизмах поворота волновых передач позволило в 2—2,5 раза снизить массу редукторов при передаточных числах волновых передач 258 и 365. Схема волновой передачи крана показана на рис. 44. От двигателя 2 вращение зубчатой парой 3 передается дисковому генератору волн 5. Гибкое колесо 4 вращается относительно неподвижного колеса 1 и передает вращение ведомому элементу, б.
Date: 2016-05-15; view: 752; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |