Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Интерполяция
Интерполятор – это электронный блок, обеспечивающий расчет промежуточных координат между опорными точками по заданной траектории.
Интерполяция может быть линейной, круговой и для любых других траекторий, линий, которые могут быть описаны строгим математическим выражением. В большинстве станков, как правило, применяются линейная, круговая и винтовая интерполяции
При интерполяции любая линия заменяется ломаной линией контура (заменяет теоретически заданную).
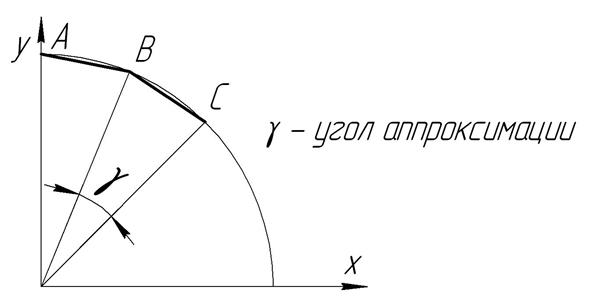
Рис.10.1 Аппроксимация (разбиение на ломаные линии)
Под интерполяцией понимают выдачу информации о траектории движений инструмента в интервале между координатами опорных точек, заданных в УП. Если траектория движения между опорными точками задана прямой, то выполняют линейную интерполяцию, если окружностью, то круговую интерполяцию.
Интерполяцию выполняют с помощью электронных схем (в УЧПУ Н22, Н33 и др.) либо с помощью программно-математического обеспечения (в микропроцессорных устройствах ЧПУ). Однако в обоих случаях интерполируют по одним и тем же математическим выражениям.
Интерполятор отрабатывает программу последовательно отдельными участками (кадрами), при линейной интерполяции — это участки прямых линий, расположенных в пространстве.
Предположим, что необходимо отработать кадр, представляющий собой отрезок АВ (рис. 10.2), расположенный в плоскости XУ (ха, уа — координаты точки А, хb, yb — координаты точки В). Отработку кадра ведут в направлении от точки А к точке В. Особенностью интерполятора является то, что исходной информацией для него являются не координаты точек отрабатываемого отрезка (ха, уа, хb, уb), а разность координат конечной В и начальной А точек отрезка, т. е. приращения по координатам:

В микропроцессорных УЧПУ эта разность вычисляется, а в УЧПУ со схемной реализацией алгоритмов задается при программировании. Это равносильно тому, что для каждого отдельного участка устанавливают свою относительную систему координат (x'>y') (рис. 10.3). При этом начало относительной системы координат совпадает с началом отрабатываемого отрезка, т.е. координаты начала отрезка x0' = 0; y0' = 0, а координаты конца отрезка
 .
.
При программировании траектории число относительных систем координат равно числу участков (кадров) отработки (рис. 10.3).
Рис. 10.2 Относительные координаты отрезка АВ
Рис. 10.3 Относительные координаты ряда отрезков траектории
На каждый импульс, вырабатываемый интерполятором, привод подач соответствующей координаты станка осуществляет единичное перемещение в соответствии с дискретностью станка. Например, для того чтобы переместиться по координате на 5 мм при дискретности 0,01 мм, интерполятор должен выдать по этой координате 500 импульсов. Величины перемещений по координатам, т. е. величины хк, yк, zк, задаются в интерполятор числом единиц дискретности. Кадр программы, в котором необходимо отработать перемещения хк = +76,25 мм, yк = — 43,00 мм и zк = + 7,10 мм, при дискретности 0, 01 мм будет иметь вид: Х + 7625; У—4300; Z + 0710. Интерполятор отрабатывает этот кадр за определенное время, в соответствии со скоростью подачи, задаваемой от программы в блок задания скорости. Для того чтобы рабочий орган станка перемещался строго вдоль запрограммированного отрезка прямой, импульсы, вырабатываемые интерполятором по каждой из координат, должны быть равномерно распределены по времени. Неравномерность следования вырабатываемых интерполятором импульсов определяет точность интерполятора и влияет на работу приводов подач.
Наиболее простым типом схемного интерполятора является линейный интерполятор на умножителях с отбором импульсов со специального многоразрядного счетчика.
Принцип линейной интерполяции, основанный на счетчиках с отбором импульсов с декад, применялся только в УЧПУ первого поколения («Контур ЗП», «Контур 2ПТ» и др.). В устройствах второго поколения типа Н22, НЗЗ и микропроцессорных УЧПУ используются более совершенные алгоритмы. Однако линейная интерполяция на счетчиках с отбором также применяется в качестве вспомогательного мини-интерполятора. Такие мини-интерполяторы используются в некоторых устройствах в случае двухэтапной интерполяции: грубой и точной. Грубая интерполяция выдает информацию об опорных точках через большие интервалы траектории. Эта информация используется в мини-интерполяторе в качестве исходной. При этом грубая интерполяция выполняется программно, а тонкая (например, на участке 2—3 мм) аппаратно. Такой подход позволяет применить менее быстродействующие процессоры и увеличить число управляемых координат станка.
Рассмотрим алгоритмы линейно-круговой интерполяции. Наибольшее распространение получил способ, опирающийся на решение дифференциальных уравнений прямой и окружности (метод цифровых дифференциальных анализаторов — ЦДА), и способ, в основу которого положено решение алгебраических уравнений (метод оценочной функции).
В большинстве УЧПУ линейно-круговая интерполяция производится по методу оценочной функции.
Линейная интерполяция методом оценочной функции. Интерполируемая прямая ОА (рис. 10.4) разделяет плоскость XY на две области: F > 0 (где значение оценочной функции F положительно) и F < 0 (где значение оценочной функции F отрицательно). Область F > 0 находится над прямой, область F < 0 — ниже ее, интерполируемый отрезок ОА прямой представляет собой область, где F = 0.
Рис 10.4 Линейная интерполяция на участке ОА методом оценочной функции с поочередными шагами по координатам X и Y
Если промежуточная точка траектории интерполяции (например, точка с координатами х1, у1) находится в области F > 0, то следующий шаг (перемещение на одну дискрету) дается по оси X. Если же промежуточная точка траектории, например точка с координатами х2, у1, находится на области F < 0, то следующий шаг дается по оси Y.
Поскольку работа происходит в относительной системе координат, начало интерполируемого отрезка всегда находится в начале координат. При этом начальная точка траектории интерполяции находится в начале интерполируемого отрезка (в области F = 0) и имеет координаты x0 = 0; y0 = 0.
Так как начальная точка траектории интерполяции находится в области F=0, первый шаг делается по оси X в точку с координатами x1 = 1; y0 = 0. Эта точка находится в области F < 0, поэтому следующий шаг делается по оси Y в точку с координатами x1 = 1, y1 = 1. Шаг дается по оси X в точку с координатами x2 = 2, у2 = 1. Шаги делаются непрерывно (с частотой, определяемой блоком задания скорости) до тех пор, пока траектория интерполяции не достигнет конца отрезка с координатами xk, yk.
Если интерполируемый отрезок совпадает с осью X (т. е. Yk = 0), траектория интерполяции совпадает с самим отрезком и не выходит из области F = 0.
Если интерполируемый отрезок совпадает с осью Y, то первый шаг (который всегда должен быть по оси X) не делается.
Величина и знак оценочной функции вычисляются интерполятором. Для каждой промежуточной точки траектории интерполяции (с координатами xi, уj) оценочная функция Fij зависит от координат хk, yk конечной точки интерполируемого отрезка, вводимых от программы, и вычисляемых текущих координат хi, уj, т. е. Fij = yjxk - xiyk.
Поскольку в начальной точке траектории интерполяции xi = х0; yi = y0, оценочная функция в начальной точке F00 = 0, так как х0=0 и y0 = 0.
Текущие значения оценочной функции определяются следующим образом: при шаге по оси X координата у текущей точки траектории интерполяции не меняется, а координата х увеличивается на единицу, т. е. xi + 1 = xi + 1; при шаге по оси Y координата х не меняется, а координата y увеличивается на единицу, т. е. yj + 1 = yj + 1; при шаге по оси X из точки с координатами хi, yj в точку с координатами xi + 1, уj оценочная функция
Fi + 1; j =yj xk – хi + 1уk = уj xk - (xi + 1) yk = yj xk – xi yk - yk.
Но величина y yj xk – xi yk = Fij , поэтому Fi + 1; j = Fij - yk.
При шаге по оси Y оценочная функция Fi; j + 1 = Fij + xk.
Поскольку начальное значение оценочной функции равно нулю, все ее последующие значения определяются только с помощью величин xk и yk. При этом знак оценочной функции, получившейся в результате очередного шага, определяет направление следующего шага.
Круговая интерполяция методом оценочной функции заключается в следующем. Окружность, на которой расположен интерполируемый отрезок дуги, разделяет плоскость XY на две области: F > 0, лежащую вне круга, ограниченного окружностью, и область F < 0, лежащую внутри круга, ограниченного окружностью; сама окружность представляет собой область, где F = 0 (см. рис. 10.5). Интерполируемый отрезок дуги имеет начальную точку с координатами х0, y0 и конечную точку с координатами xk, yk (начало относительных координат находится в центре окружности) (рис. 10.5).
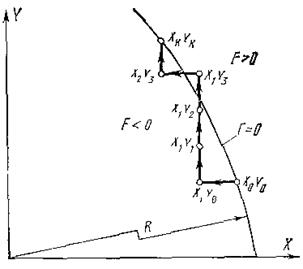
Рис. 10.5 Круговая интерполяция дуги методом оценочной функции с поочередными шагами по координатам X и У
Если промежуточная точка траектории интерполяции (например, точка с координатами х1, у3) находится в области F > 0, то следующий шаг дается по оси X. Если же промежуточная точка траектории интерполяции (например, точка с координатами x2, у3) находится в области F < 0, то следующий шаг дается по оси Y.
При интерполяции дуги окружности из точки с координатами хi, уj в точку с координатами xi+1, уj координата xi +1 = xi - 1.
При шаге по оси Y из точки с координатами хi, уj в точку с координатами xi, уj+1 координата уj+1 = уj + 1.
При круговой интерполяции координаты начальной точки траектории (х0, у0) определяются по формуле x02 + y02 =R2, где R — радиус интерполируемой дуги окружности.
Оценочная функция в начальной точке траектории равна F00 = 0, а в промежуточной точке траектории Fij = xi2 + yj2 - R2
При шаге по оси X из точки с координатами хi, уj в точку с координатами xi+1, уj оценочная функция Fi + 1; j = Fij —2xi, + 1; при шаге по оси Y из точки с координатами хi, уj в точку с координатами xi, уj+1 оценочная функция
Fiy+1 = Fij + 2yi + 1.
Date: 2016-02-19; view: 2387; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |