Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Двигатели приводов главного движения
Асинхронные односкоростные электродвигатели получили преимущественное распространение в приводах главного движения со ступенчатым регулированием в связи с их небольшой стоимостью, высокой надежностью, возможностью значительных перегрузок с жесткостью механической характеристики. Они не требуют применения специальных преобразователей, усилителей, имеют небольшие габариты и массу. Частота вращения двигателя
 (70)
(70)
где f – частота переменного тока сети, Гц (обычно f = 50 Гц); S – скольжение ротора; р – число пар полюсов в обмотке статора.
Однако в этом случае привод обычно содержит сложную многоступенчатую коробку скоростей, затруднена также автоматизация переключения скоростей.
Иногда применяются многоскоростные асинхронные электродвигатели, в которых частота вращения изменяется за счет переключения числа пар полюсов р. Чаще всего применяются двухскоростные двигатели, при этом упрощается коробка скоростей за счет исключения соответствующего двойного блока; скорость вращения шпинделя можно автоматически изменять в два раза, так как двигатели имеют синхронные частоты вращения пД = 1500/3000, пД = 750/1500 или пД = 500/1000 об./мин. Очень редко применяют трех и четырехскоростные электродвигатели. Стоимость, габариты и масса многоскоростных электродвигателей существенно выше, чем у односкоростных.
В приводах главного движения станков с бесступенчатым регулированием, особенно с ЧПУ, применяют регулируемые электродвигатели постоянного тока, с двухзонным регулированием, частота вращения которых
 (71)
(71)
где Uя,Iя,rя – соответственно напряжение, сила тока и сопротивление в цепи якоря; Фв – магнитный ток возбуждения; С – постоянная двигателя.
При этом момент на валу двигателя
 (72)
(72)
где kм – коэффициент пропорциональности.
Регулирование частоты вращения двигателя от минимальной п д min до номинальной пн происходит за счет изменения подводимого к якорю напряжения Uя при постоянном моменте Мд. Мощность двигателя Рд увеличивается пропорционально частоте его вращения, достигая номинального значения при пн. Дальнейшее регулирование до пдmax происходит за счет уменьшения магнитного потока возбуждения при постоянной номинальной мощности, момент Мд при этом уменьшается. Таким образом, двигатель имеет зону регулирования с постоянной мощностью при диапазоне (RД)р = (п д) / пн.. Величина этого диапазона обычно не превышает 2,5 – 6.
В другой зоне работы диапазон регулирования с постоянным моментом (Rд)/ М= пн/(пд)min может быть достаточно большим. Как правило, диапазон (RД)р существенно меньше требуемого на шпинделе диапазона регулирования Rp (рис. 139). Поэтому для его расширения последовательно регулируемому двигателю включают коробку скоростей с диапазоном регулирования Rк и числом ступеней скорости ZK, равным 2, 3 или 4 (рис. 139, а). Условный график частот вращения такого привода с ZK = 3 изображен на рис. 139, б. При этом регулируемый двигатель и коробка скоростей представленны как последовательно соединенные групповые передачи с соответствующими диапазонами регулирования, причем Rp = (RД)р/Rк. Максимальная частота вращения шпинделя пmax
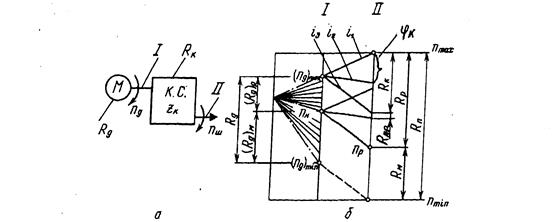
Рис. 139 Привод главного движения с регулируемым двигателем.
а – общая схема б – график частот вращения.
получена от (п д) тах при передаточном отношении коробки i1, соответственно — пР от пн при передаточном отношении i3. Величина птin с учетом передаточного отношения i3 определяет необходимую для конкретного привода минимальную частоту вращения двигателя (п д) min.
Диапазон Rк = (φк)Zк- 1, где φк — знаменатель ряда передаточных отношений в коробке скоростей. Если φк <(RД)p, то получается перекрытие частот вращения Rnp на шпинделе в пределах диапазона Rр.
Следует учитывать, что несмотря на возможность бесступенчатого регулирования частот вращения на шпинделе, обычно для удобства управления переключение частот вращения осуществляется ступенчато по закону геометрической прогрессии со знаменателем φ=1,12 или φ =1.06. Недостатки двигателя постоянного тока связаны с наличием коллекторно-щеточного узла, что снижает его надежность и ограничивает максимальные частоты вращения. Поэтому в последнее время в станках применяются бесколлекторные вентильные двигатели и регулируемые за счет изменения частоты f (формула (70)) асинхронные двигатели переменного тока. Однако их диапазоны регулирования с постоянной мощностью также ограничены, и структура привода остается такой же, как и рассмотренная ранее.
Регулируемые электродвигатели, системы их управления существенно удорожают привод, однако механическая часть привода значительно упрощается. Наличие в современных регулируемых двигателях датчика углового положения ротора и электромагнитного тормоза позволяет создать унифицированные приводы главного движения в виде компактного мехатронного узла — мотор-шпиндель с микропроцессорным управлением без всяких промежуточных механических элементов.
Гидравлические двигатели в виде гидроцилиндра получили широкое применение при небольшой длине хода (обычно до 1,2 м) в приводах главного движения с поступательным перемещением рабочего органа. (Например, в протяжных станках.) Иногда применяются и гидромоторы для получения вращательного движения шпинделей (например, в шпиндельных головках). Преимущества гидропривода связаны с простотой осуществления реверсирования, торможения и бесступенчатого регулирования скоростей в широком диапазоне, малыми габаритами, возможностью непосредственного без всяких механических передач соединения двигателя с исполнительным органом станка. Главными недостатками гидропривода являются сложность коммуникаций и меньшая надежность
В высокоскоростных инструментальных головках в качестве приводного двигателя иногда используется пневмотурбинка, посаженная непосредственно на шпиндель.
Date: 2016-02-19; view: 1226; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |