Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Выбор двигателя (энергетический расчет)
Для заполнения остальных ячеек матрицы необходимо знать параметры электродвигателя и передаточные числа механических передач. В настоящее время в машиностроении наибольшее распространение в качестве источника энергии получили электрические двигатели постоянного и переменного тока. Двигатели постоянного тока используются в приводах, где требуется большой диапазон регулирования скорости. Двигатели переменного тока могут быть синхронные и асинхронные. Первые более дорогие в изготовлении и эксплуатации, но имеют строго постоянную частоту вращения, независимо от нагрузки. У двигателей асинхронных при изменении нагрузки происходит уменьшение синхронной частоты вращения в небольшом диапазоне. Если эти изменения не влияют на работу машины, то предпочитают применять эти двигатели. Именно к таким машинам в большинстве схем заданий предстоит разработать привод.
Асинхронные двигатели (AD) выпускаются с различной номинальной частотой вращения. Синхронная частота вращения для наиболее используемых двигателей может быть 3000, 1500, 1000 и 750 об/мин. Назначение частоты вращения должно производиться с экономической точки зрения с целью получения наиболее дешевого привода.
Ориентировочная частота вращения вала двигателя может быть определена по зависимости (12):
 , (24)
, (24)
где  – частота вращения приводного вала машины, а
– частота вращения приводного вала машины, а  –передаточное число привода.
–передаточное число привода.
Оптимальное передаточное число привода определяется как
 , (25)
, (25)
где  и т.д. – оптимальные передаточные числа (отношения) передач, входящих в привод, которые могут быть приняты как средние значения из справочных данных (таблица 2).
и т.д. – оптимальные передаточные числа (отношения) передач, входящих в привод, которые могут быть приняты как средние значения из справочных данных (таблица 2).
В приводах рекомендуется использовать двигатели с синхронной частотой вращения 1000 или 1500 об/мин, так как, чем меньше частота вращения двигателя, тем больше он по размерам, а при больших частотах вращения первая передача в приводе получается весьма быстроходной, и при её проектировании необходимо учитывать некоторые особенности, в частности, отсутствие недопустимых колебаний. Кроме того, в соответствии с ГОСТ Р 50891-96 «Редукторы общемашиностроительного применения. Общие технические условия» скорость вращения входного вала для червячных, червячно-цилиндрических, цилиндрически-червячных редукторов не должна превышать 1800 об/мин.
По полученной мощности на валу двигателя P1 и частоте вращения n1 можно выбрать тип двигателя. При этом частота вращения выбирается ближайшей от полученного значения, но при этом, как указывалось выше, следует предусматривать возможность применения двигателя с синхронной частотой вращения 1000 или 1500 об/мин. Мощность выбранного AD не должна быть меньше полученной из расчета мощности более чем на 5%. Из всех выпускаемых AD следует использовать двигатели последней единой серии 4А или АИР. Характеристики некоторых AD серии 4А представлены в таблице 3. AD с другими характеристиками могут быть выбраны из справочных данных на двигатели [1, 10].
В период пуска двигатель для преодоления инерционных нагрузок должен развивать больший вращающий момент Mпуск, чем при установившемся движении Mном. Если имеет место  , где
, где  – необходимый пусковой момент для разгона машины, то двигатель будет разгоняться в нужном режиме. Если же
– необходимый пусковой момент для разгона машины, то двигатель будет разгоняться в нужном режиме. Если же  , разгон двигателя замедляется. В этом случае двигатель нагревается более интенсивно, и, если пуски двигателя проводятся часто, двигатель может выйти из строя (отказать) в результате чрезмерного нагрева обмотки. Поэтому в приводах,
, разгон двигателя замедляется. В этом случае двигатель нагревается более интенсивно, и, если пуски двигателя проводятся часто, двигатель может выйти из строя (отказать) в результате чрезмерного нагрева обмотки. Поэтому в приводах,
Таблица 3 Электродвигатели асинхронные трехфазные единой серии 4А (выборка из ГОСТ 19523-81)
| Тип двигателя | Синхронная частота вращения | |||||||||||
| P | n | Kn | P | n | Kn | P | n | Kn | P | n | Kn | |
| 4А71А?УЗ | 0,75 | 2,0 | 0,55 | 2,0 | ||||||||
| 4А71В?УЗ | 1,1 | 2,0 | 0,75 | 2,0 | 0,55 | 2,0 | ||||||
| 4А80А?УЗ | 1,5 | 2,1 | 1,1 | 2,0 | 0,75 | 2,0 | ||||||
| 4А80В?УЗ | 2,2 | 2,1 | 1,5 | 2,0 | 1,1 | 2,0 | 0,55 | 1,6 | ||||
| 4А90LA8УЗ | - | - | - | - | - | - | - | - | - | 0,75 | 1,6 | |
| 4А90LB8УЗ | - | - | - | - | - | - | - | - | - | 1,1 | 1,6 | |
| 4А90L?УЗ | 3,0 | 2,1 | 2,2 | 2,1 | 1,5 | 2,0 | - | - | - | |||
| 4А100S?УЗ | 4,0 | 2,0 | 3,0 | 2,0 | - | - | - | - | - | - | ||
| 4А100L?УЗ | 5,5 | 2,0 | 4,0 | 2,0 | 2,2 | 2,0 | 1,5 | 1,6 | ||||
| 4А112MA?УЗ | - | - | - | - | - | - | 3,0 | 2,0 | 2,2 | 1,9 | ||
| 4А112MB?УЗ | - | - | - | - | - | - | 4,0 | 2,0 | 3,0 | 1,9 | ||
| 4А112M?УЗ | 7,5 | 2,0 | 5,5 | 2,0 | - | - | - | - | - | - | ||
| 4А132S?УЗ | - | - | - | 7,5 | 2,2 | 5,5 | 2,0 | 4,0 | 1,9 | |||
| 4А132M?УЗ | 11,0 | 1,7 | 11,0 | 2,2 | 7,5 | 2,0 | 5,5 | 1,9 | ||||
| 4А160S?УЗ | 15,0 | 1,4 | 15,0 | 1,4 | 11,0 | 1,2 | 7,5 | 1,4 | ||||
| 4А160M?УЗ | 15,0 | 1,2 | 11,0 | 1,4 |
Примечания: 1. P – номинальная мощность электродвигателя, кВт; n – асинхронная частота вращения, об/мин; Kn – кратность пускового момента.
2. В обозначении AD вместо? подставлять число полюсов соответственно для 3000, 1500, 1000 и 750 об/мин – 2, 4, 6 и 8
в которых двигатели пускаются часто, необходимо выбранный двигатель проверять по пусковому моменту по условию:
 , (26)
, (26)
где  – необходимый номинальный крутящий момент для работы машины;
– необходимый номинальный крутящий момент для работы машины;
 – номинальный крутящий момент электродвигателя;
– номинальный крутящий момент электродвигателя;
 – кратность пускового момента электродвигателя приведена в таблице 3.
– кратность пускового момента электродвигателя приведена в таблице 3.
Если имеется типовой график нагрузки, то следует считать, что и проверка по пусковому моменту не требуется.
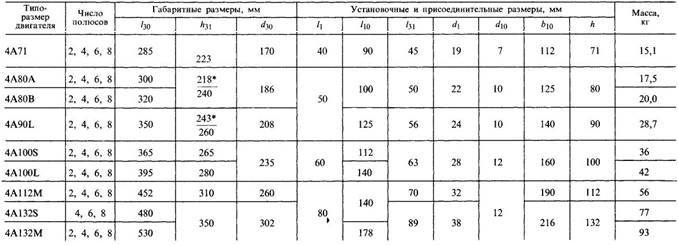
Габаритные, установочные и присоединительные размеры выбранного AD серии 4А принимают согласно данных ГОСТ 18709-73. Выборка из стандарта приведена в таблице 4. Исполнение двигателя выбирается в зависимости от конструкции привода. Для приводов механизмов, работающих в повторно-кратковременном режиме с частыми пусками под нагрузкой и требующих фиксированного останова за регламентированное время после отключения электродвигателя от сети, используются AD серии 4А со встроенным электромагнитным тормозом (4А…Е). Электродвигатели выпускаются в диапазоне высот оси вращения 56…160 мм и имеют степень защиты IP4. Они разработаны на базе основного AD или AD с повышенным скольжением. Отличительным признаком является наличие специального тормозного устройства, обеспечивающего тормозной момент не менее 1,5 номинального вращающего момента. Время торможения tТ и время растормаживания tР не превышает следующих значений:
| Высота оси вращения, мм | tТ, мс | tР, мс |
| 56-100 | ||
| 112-160 |
AD со встроенным электромагнитным тормозом (ВЭТ) имеют технические данные аналогичные AD основного исполнения. Они обозначаются как и двигатели основного исполнения, только после обозначения числа полюсов (в таблице 3 -?) ставится буква Е. Например, AD серии 4А с высотой центров 100 мм и ВЭТ, с синхронной частотой вращения 1500 об/мин будет обозначаться: 4А100L4ЕУ3. В курсовых проектах AD с ВЭТ применяются в конвейерах, подъемниках, приводах грузоподъемных машин. В проекте все их присоединительные размеры принимать как у основного AD.

Рисунок 1 – Габаритные установочные и присоединительные размеры электродвигателей серии 4А исполнение 1М 1081
Таблица 4 Габаритные установочные и присоединительные размеры электродвигателей серии 4А исполнение 1М 1081, степень защиты IP44, IP54,h = 71 - 160 мм

Date: 2016-02-19; view: 656; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |