Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
При открытом состоянии 1 на дроссель подается напряжение питания и по его обмотке протекает нарастающий ток , а в магнитном
поле дросселя запасается электромагнитная энергия. Полярность напряжения на обмотке дросселя  (на рис.88 а,б обозначены без скобок). Диод
(на рис.88 а,б обозначены без скобок). Диод  1 при этом закрыт под действием обратного напряжения, равного
1 при этом закрыт под действием обратного напряжения, равного  . Во время
. Во время  напряжение
напряжение  на
на  равно
равно  .
.
Запирание  1 приводит к разрыву цепи заряда дросселя
1 приводит к разрыву цепи заряда дросселя  . При этом эдс обмотки дросселя изменяет полярность (рис. 88 а,б в скобках). Полярность этой эдс противоположна той, которая имелась на дросселе ранее, и полярности напряжения питания . Диод 1 открывается, и энергия, запасенная в магнитном поле дросселя, поступает на параллельно соединенные конденсатор C 2 и сопротивление нагрузки .
. При этом эдс обмотки дросселя изменяет полярность (рис. 88 а,б в скобках). Полярность этой эдс противоположна той, которая имелась на дросселе ранее, и полярности напряжения питания . Диод 1 открывается, и энергия, запасенная в магнитном поле дросселя, поступает на параллельно соединенные конденсатор C 2 и сопротивление нагрузки .
Конденсатор C 2 дозаряжается, восстанавливая уменьшившееся за предыдущий интервал  напряжение. Таким образом, на сопротивлении нагрузки образуется постоянное напряжение с полярностью, противоположной полярности входного напряжения .
напряжение. Таким образом, на сопротивлении нагрузки образуется постоянное напряжение с полярностью, противоположной полярности входного напряжения .
Величина напряжения на выходе ИСН может быть как меньше, так и больше входного напряжения.
В отличии от рассмотренных, в этом стабилизаторе на рис. 88 накопительная катушка L 1 включена не последовательно с нагрузкой, а параллельно ей. При открытом транзисторе VT 1 ток через катушку нарастает, а диод VD 1 закрыт, так как напряжение на его аноде (относительно катода) отрицательно.
Когда же транзистор закрывается, полярность напряжения на катушке изменяется на обратную, диод VD 1 открывается, и ток, создаваемый катушкой, убывает до тех пор, пока транзистор не откроется вновь.
Выражение, определяющее значение  в зависимости от
в зависимости от  и
и  , имеет вид:
, имеет вид:
 .
.
Знак положительный, так как знак напряжения на нагрузке противоположен знаку напряжения питания. Напряжение на нагрузке и ток нагрузки зависят от:
Амплитуды пульсации токов дросселя, транзистора и диода определяются по аналогичным выражением для «повышающего» ИСН.
Максимальные значения токов дросселя, транзистора и диода равны:

Минимальный ток дросселя можно определить из выражения:

Индуктивность  рассчитывают по формуле:
рассчитывают по формуле:

или 
а емкость конденсатора  - по формуле:
- по формуле:
Требуемое отношение  рассчитывают по формуле:
рассчитывают по формуле:
Семейство выходных и регулировочных характеристик строится по соотношению:
Коммутационные процессы в этой схеме, как и в «понижающем» ИСН, приводят к перегрузке транзистора в первые моменты после его отпирания. Пока не рассосется заряд неосновных носителей в базе диода, через диод и открывшийся транзистор проходит ток разрядки конденсатора C 2. Этот ток является для диода обратным, а для транзистора прямым. При инерционном диоде он может достичь больших значений. Разрядка конденсатора C 2 через VD 1 и VT 1 на первичный источник приводит к увеличению пульсации выходного напряжения.[5].
2.3. Методы стабилизации напряжения и эквивалентная схема системы управления импульснымиИВЭП
В значительной степени сложность и экономичность схемы источника питания зависит от выбранного способа управления силовым каскадом и методов стабилизации вторичных напряжений. Рассмотрим несколько возможных вариантов решения этих проблем.
Как отмечалось выше, одним из основных преимуществ импульсных ИВЭП является преобразование напряжения первичной электрической сети в напряжение требуемого уровня с более высоким КПД по сравнению с обычными (низкочастотными, 50, 400 Гц) трансформаторными источниками питания. Чаще всего это достигается за счет стабилизации выходного напряжения путем воздействия на регулирующее устройство (РУ) силовой части (СЧ) преобразователя напряжения (ПН) или импульсного стабилизатора напряжения (ИСН).
Для стабилизации величины выходного напряжения используются различные методы регулирования, основными среди них являются: широтно-импульсная модуляция (ШИМ), частотно-импульсная модуляция (ЧИМ) и релейная система регулирования (РСР).
В общем принцип действия ШИМ стабилизации заключается в изменении длительности импульсов, усиливаемых силовым каскадом, без коррекции собственно частоты колебаний и их амплитуды. Длительность импульсов, формируемых схемой управления, должна быть обратно пропорциональна величине напряжения на нагрузке. Процесс стабилизации вторичного напряжения с помощью ШИМ представлен на рис. 89.
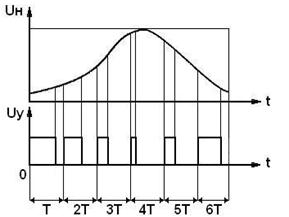
Рис. 89
Кривая U н отражает изменение напряжения на нагрузке при отсутствии стабилизции.
Характер изменения длительности импульсов в зависимости от U н показан на графике U у (t), временная шкала содержит отметки кратные Т - условному периоду следования импульсов.
В стабилизаторах с ШИМ частота импульсов U у стабильна (то есть Т = const), а их длительность уменьшается с увеличением выходного напряжения U н.
В отличие от предыдущего способа, ЧИМ стабилизация характери-зуется модификацией частоты (то есть изменением периода Т следования импульсов) управляющего сигнала при постоянной длительности импульсов. На качественной диаграмме отработки частотным модулятором изменения напряжения U н, приведенной на рис. 90, показано изменение частоты импульсов, обратно пропорциональное значению U н.
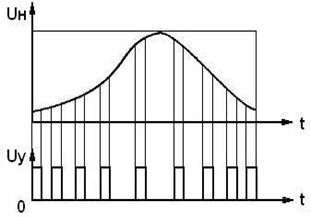 Рис. 90
Рис. 90
|
В стабилизаторах с ЧИМ длительность импульсов U у не изменяется, а их частота уменьшается при повышении выходным напряжением заданного значения. В релейной системе стабилизации цепи управления отслеживают изменения напряжения на нагрузке и, когда его значение выходит за пределы допустимой зоны стабилизации, производится формирование импульсов, при воздействии которых и происходит «подкачка» энергии в цепь нагрузки.
 Рис. 91
Рис. 91
|
На рис.91 изменением управ-ляющего импульсного сигнала U у(t) изображено регулирование уровня напряжения на нагрузке U н. Уров-нями U noр1 и U пор2 задан диапазон, в рамках которого должно находиться U н. Генерация импульса начинается в момент понижения U н ниже уров-ня U no2, а прекращается при его возрастании более установленного U nop1.Как видно из рис. 91, частота следования импульсов и их длительность варьируется в широких пределах и определяется свойствами нагрузки.
Диаграммы показывают качественную сторону регулирования и не отражают реальную картину процессов с учетом задержек срабатывания схем, погрешностей измерений.
Способ ШИМ стабилизации, несмотря на некоторое схемотехническое усложнения узла по сравнению с двумя другими методами, нашел наиболее широкое применение на практике. Поэтому этот метод стабилизации вторичного напряжения будет рассмотрен наиболее подробно. ШИМ регуляторы имеют следующие преимущества:
· обеспечение высокого КПД и поддержание основной частоты преобразования независимо от изменения напряжения первичного питания и величины нагрузки. При этом частота пульсаций на нагрузке имеет постоянное значение, что важно при проектировании и использовании фильтров с расчетными характеристиками и может быть критичным для нагрузок с различным характером входного сопротивления;
· возможность применения цепей синхронизации частоты с внешним задающим генератором, обладающим заданными параметрами.
Все магнитопроводы, которые используются в силовых частях преобразователей и импульсных стабилизаторов напряжения, имеют определенные ограничения по частотным характеристикам, поэтому стабильность частоты ШИМ ИСН и ПН позволяет наиболее правильно выбирать материал сердечника для них и эффективно использовать их возможности.
Эквивалентная схема системы управления импульсного стабилизатора напряжения с ШИМ
Как следует из ранее (ИСН с идеальным ключом) приведенного уравнения для напряжения U Н = t и f U п, регулирование его может осущест-вляться изменением времени открытого (или закрытого) состояния регулирующего элемента при постоянной частоте коммутации f, что соответствует способу широтно-импульсной модуляции.
При способе ШИМ регулирование выходного напряжения U вых = U вх t и/ T осуществляется изменением длительности импульсов t и или K з = t и/ T, подводимых к первичной обмотке трансформатора инвертора или к выходному фильтру импульсного стабилизатора напряжения при постоянной частоте (f = const) их следования (при постоянной частоте коммутации силовых транзисторов). В свою очередь, различают импульсную модуляцию 1-го рода, когда параметры импульсной последовательности на входе непрерывной части изменяются в зависимости от управляющего сигнала в фиксированные и равноотстоящие друг от друга моменты, и модуляцию 2-го рода, когда параметры указанной импульсной последовательности определяются текущими (мгновенными) значениями управляющего сигнала [13].
В качестве устройств, непосредственно осуществляющих модуляцию параметров высокочастотной импульсной последовательности, наиболее широко используются полупроводниковые модуляторы, которые сравнивают аналоговый сигнал, пропорциональный ошибке регулирования, с внешним периодическим сигналом пилообразной формы, а длительность каждого из импульсов на входе непрерывной части определяется моментами совпадения обоих сигналов.
Модуляция импульсов первого рода
На рис. 92 показана эквивалентная схема силовой части ИСН и система автоматического регулирования.
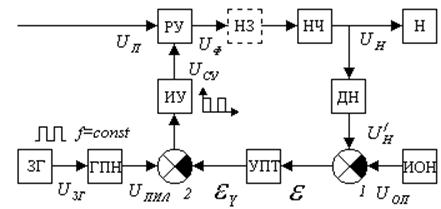
Рис. 92
С целью упрощения физических процессов в ИСН, происходящих при его работе, на первом этапе предположим, что мгновенное (текущее) значение напряжения u н на выходе (на нагрузке и, соответственно, e y) стабилизатора не изменяется из-за действия возмущающих факторов, а его постоянная составляющая U н изменяется по величине (увеличивается или уменьшается).
Этот случай соответствует импульсной модуляции 1-го рода, когда параметры импульсной последовательности на входе непрерывной части изменяются в зависимости от управляющего сигнала в фиксированные и равноотстоящие друг от друга моменты времени.
В цепь прямой передачи изображенной системы автоматического регулирования входят:
· Непрерывная часть (НЧ), содержащая сглаживающий фильтр L 1 C 2 с нагрузкой R н (рис. 92), характеризующейся коэффициентом передачи фильтра K ф = R н/(R н + R L), где R L – активное сопротивление дросселя фильтра; постоянной времени фильтра TФ =  .
.
· Цепь обратной связи, состоящая из:
а) делителя напряжения (ДН) с коэффициентом передачи K ДН = R 2/(R 1 + R 2), где R 1 и R 2 – сопротивления соответственно верхнего и нижнего плеча ДН сравнивающего устройства 1, куда подаются два сигнала:  , несущего информацию о напряжении на нагрузке, и U оп - напряжение опорного (эталонного) источника питания (ИОН).
, несущего информацию о напряжении на нагрузке, и U оп - напряжение опорного (эталонного) источника питания (ИОН).
б) усилителя сигнала рассогласования (УСР) (усилителя постоянного тока УПТ), на вход которого поступает сигнал ошибки  , а с выхода снимается e y = Ky e, где Ky - коэффициент усиления УПТ (УСР).
, а с выхода снимается e y = Ky e, где Ky - коэффициент усиления УПТ (УСР).
Цепь обратной связи характеризуется коэффициентом K ос = К ДН К y.
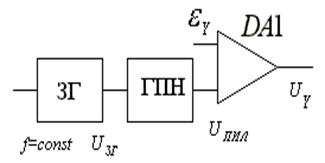
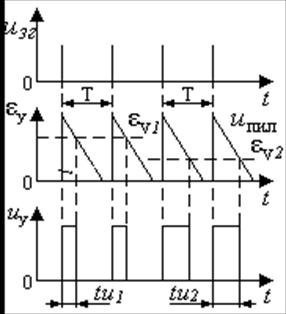
· Широтно-импульсный модулятор (ШИМ) - компаратор, который представлен на структурной схеме в виде сравнивающего устройства 2 (рис. 92, а на рис. 93, а обозначен DA 1). Преобразование уровня напряжения во временной интервал происходит следующим образом. Задающий генератор вырабатывает последовательность импульсов с частотой f = const (т.е. T = const). По каждому импульсу ЗГ запускается генератор пилообразного напряжения (ГПН), на выходе которого формируется линейно-изменяющееся напряжение пилообразной формы например, с модуляцией заднего фронта - убывающей пилы U пил (рис.93, б) или с модуляцией переднего фронта - нарастающей пилы U пил (рис.93, в).
В момент, когда медленно изменяющееся входное напряжение e y (ан-налоговый сигнал пропорциональный напряжению на нагрузке) становится равным пилообразному U пил, на входе компаратора DA 1 создается перепад напряжения UУ, которое представляет собой прямоугольные импульсы, модулированные по длительности (по ширине) в соответствии с уровнем сигнала e y, пропорционально выходному напряжению ИСН. Следовательно, происходит преобразование аналогового сигнала в ШИМ-сигналы(рис.93, б).
U пил = (U m/ T)(T - t и) = U m(1 - K з),
где U m - амплитуда пилообразного напряжения; t и - длительность прямоугольного импульса на выходе ШИМ (рис. 93, б).
 а
а
 б
б
 в
Рис. 93
в
Рис. 93
|
Коэффициент усиления (передачи) широтно-импульс-ного модулятора определяет-ся выражением: K ш= К ос/ U m [6].
Относительная длитель-ность импульсов прямоуголь-ного напряжения может быть определена из условия равен-ства сигналов на входе ШИМ (сравнивающего устройства 2) e y = U пил:
U m(1 - K з)= К y[ K ДН U н (t) - U оп],
откуда

Это выражение явля-ется основным уравнением широтно-импульсного модулятора, связывающим напряжение на нагрузке с  или с дли-тельностью импульса, по-даваемого на регулирующее устройство:
или с дли-тельностью импульса, по-даваемого на регулирующее устройство:
 ,
,
и параметрами ИОН ( ); ДН (
); ДН ( ), УПТ (
), УПТ ( ), ГПН (
), ГПН ( ) и периодом Т (частотой) рабо-ты задающего генератора.
) и периодом Т (частотой) рабо-ты задающего генератора.
Сформированные таким образом импульсы прямоу-гольной формы подаются на вход регулирующего устройства РУ (они, в случае необходимости, могут быть усилены - U су предварительным импульсным усилителем мощности ИУМ), что обуславливает открытое состояние силового транзистора в этот момент (начало импульса). Затем напряжения в виде прямоугольной формы с амплитудой  , где
, где  - напряжение насыщения транзис-тора РУ, поступает на вход НЧ (сглаживающего фильтра). Разность напряжений между этим и напряжением на нагрузке прикладывается к дросселю L и вызывает нарастание тока в нем на этом временном интервале. С помощью НЧ происходит демодуляция импульсов, т.е. выделение их из последовательности постоянной составляющей напряжения, которая и питает нагрузку постоянного тока на выходе ИСН. В конце импульса, когда напряжения вновь сравниваются транзисторы драйвера и регулятора запираются. Ток дросселя замыкается через сопротивление нагрузки, обратный диод и потенциал на диоде достигает прямого падения напряжения этого диода. При этом к L 1 прикладывается напряжение конденсатора фильтра, которое приводит к спаду тока через дроссель. Напряжение на С 2 при этом несколько снижается. Этот интервал называется интервалом паузы.
- напряжение насыщения транзис-тора РУ, поступает на вход НЧ (сглаживающего фильтра). Разность напряжений между этим и напряжением на нагрузке прикладывается к дросселю L и вызывает нарастание тока в нем на этом временном интервале. С помощью НЧ происходит демодуляция импульсов, т.е. выделение их из последовательности постоянной составляющей напряжения, которая и питает нагрузку постоянного тока на выходе ИСН. В конце импульса, когда напряжения вновь сравниваются транзисторы драйвера и регулятора запираются. Ток дросселя замыкается через сопротивление нагрузки, обратный диод и потенциал на диоде достигает прямого падения напряжения этого диода. При этом к L 1 прикладывается напряжение конденсатора фильтра, которое приводит к спаду тока через дроссель. Напряжение на С 2 при этом несколько снижается. Этот интервал называется интервалом паузы.
Если напряжение на нагрузке по каким-либо причинам изменилось, например, увеличилось (рис.93), то увеличатся  , что вызовет уменьшение длительности tи 1 импульсов (или КЗ) при неизменном периоде на входе РУ. Длительность импульса напряжения на входе НЧ также уменьшится, и среднее значение постоянной составляющей напряжения опять станет прежним.
, что вызовет уменьшение длительности tи 1 импульсов (или КЗ) при неизменном периоде на входе РУ. Длительность импульса напряжения на входе НЧ также уменьшится, и среднее значение постоянной составляющей напряжения опять станет прежним.
Как видно из сказанного, ШИМ возможна, если к моменту переключения РУ (транзисторов) выполняется условие: абсолютное значение скорости нарастания пилообразного напряжения больше абсолютного значения скорости нарастания напряжения на нагрузке.
Пунктиром на рис. 92 показано нелинейное звено (НЗ), появление которого в контуре регулирования вызвано инерционными свойствами используемых полупроводниковых приборов силовой части ИСН.
Модуляция импульсов второго рода.
В общем случае напряжение на нагрузке может изменяться (из-за действия возмущающих факторов) по произвольному закону (рис.89). Поэтому на втором этапе рассмотрим модуляцию 2-го рода, когда параметры импульсной последовательности определяются текущими (мгновенными) значениями управляющего сигнала [6,7,9].
Характеристика релейного элемента ИСН
 Рис. 95
Рис. 95
|
У импульсных стабилизаторов напряжения с частотно-импульсным (с двухпозиционным) управлением в цепи отрицательной обратной связи (ООС) имеется релейный элемент (РЭ) с двумя порогами срабатывания, управляющий работой регулирующего устройства (РУ) ИСН [5]. Зависимость выходного напряжения релейного элемента от управляющего напряжения цепи ООС приведена на рис.95. Такую характеристику имеет, например, триггер Шмитта.
В процессе работы стабилизатора на входе РЭ происходит непрерывное сравнение выходного напряжения стабилизатора ИСН с заданным опорным пороговым напряжением. В зависимости от приложенного к входу сигнала ошибки РЭ может находиться в одном из двух возможных состояний: открытом и закрытом.
Увеличение будет происходить до тех пор, пока не будет достигнуто определенное значение напряжения срабатывания. В этот момент произойдет размыкание силовой цепи стабилизатора и выходное напряжение начнет уменьшаться.
Снижение будет происходить до тех пор, пока не будет достигнуто пороговое напряжение отпускания. После этого РУ снова замкнет силовую часть ИСН, выходное напряжение начнет возрастать и описываемый выше процесс повторяется.
Интервал между напряжениями и характеризует зону нечуствитель-ности релейного элемента – гистерезис, т.е. разность между значениями напряжения сигнала на входе дифференциального усилителя, при котором происходит срабатывание и отпускание порогового устройства микросхемы.
Date: 2015-05-04; view: 1005; Нарушение авторских прав; Помощь в написании работы --> СЮДА... |